近日�,北京航空航天大學(xué)機(jī)械工程及自動化學(xué)院機(jī)器人研究所的丁希侖教授團(tuán)隊(duì)在機(jī)器人領(lǐng)域知名期刊《The International Journal of Robotics Research》上發(fā)表了題為“Bionic jellyfish robot achieving enhanced steering maneuverability through asymmetric tentacles”的研究論文,北京航空航天大學(xué)為第一完成單位。
水母以其柔性身體與低能耗的波動推進(jìn)能力��,在海洋生物中具備獨(dú)特優(yōu)勢�。為實(shí)現(xiàn)高效����、柔順且具方向控制能力的仿生水下機(jī)器人運(yùn)動模式�����,本研究提出了一種基于不對稱觸手?jǐn)[動機(jī)制的仿生水母機(jī)器人。該機(jī)器人通過左右觸手振幅差異產(chǎn)生轉(zhuǎn)矩,從而實(shí)現(xiàn)精確轉(zhuǎn)向����,無需額外螺旋槳或舵面結(jié)構(gòu)���,大幅提高了結(jié)構(gòu)緊湊性與能效比�。
本研究提出了一種基于傘狀柔性主體與嵌入式偏心凸輪驅(qū)動系統(tǒng)的仿生水母機(jī)器人,整機(jī)質(zhì)量僅287 g�,結(jié)構(gòu)緊湊且能耗極低。實(shí)驗(yàn)結(jié)果顯示,該機(jī)器人最高游速可達(dá)7.5 cm/s(約0.47 BL/s)�����,在不依賴螺旋槳或舵面的情況下實(shí)現(xiàn)了最高200°的轉(zhuǎn)向幅度與22.7°/s的轉(zhuǎn)向角速度�����。相比現(xiàn)有仿生水母機(jī)器人����,本系統(tǒng)在生物式轉(zhuǎn)向控制、輕量化設(shè)計(jì)與推進(jìn)能效方面實(shí)現(xiàn)了顯著提升,證明不對稱觸手驅(qū)動機(jī)制在水下高機(jī)動仿生推進(jìn)領(lǐng)域的可行性與優(yōu)勢。本文系統(tǒng)介紹了其結(jié)構(gòu)設(shè)計(jì)、力學(xué)模型與實(shí)驗(yàn)驗(yàn)證��,并探討了其在水下生態(tài)探測、隱匿巡航與柔性水下平臺等方向的應(yīng)用前景�����。
(一)靈感來自水母:用最“省力”的方式游泳
作為海洋生態(tài)系統(tǒng)中重要的漂浮性捕食者與能量傳遞節(jié)點(diǎn)��,水母以其柔順游動、低能耗推進(jìn)和高機(jī)動控制能力在海洋環(huán)境中發(fā)揮著關(guān)鍵作用����。與多數(shù)水下生物依賴尾鰭擺動或鰭面調(diào)節(jié)實(shí)現(xiàn)轉(zhuǎn)向不同����,水母通過傘體周期性收縮與觸手協(xié)同擺動實(shí)現(xiàn)推進(jìn),當(dāng)觸手?jǐn)[動幅度出現(xiàn)不對稱時(shí)即可產(chǎn)生不均勻流場與偏置推力���,從而完成高效而自然的方向調(diào)節(jié)。這種無需復(fù)雜關(guān)節(jié)與鰭面的柔性不對稱驅(qū)動體現(xiàn)了水母獨(dú)特的生物力學(xué)優(yōu)勢。受此啟發(fā)���,研究團(tuán)隊(duì)設(shè)計(jì)了一款僅重287 g����、直徑11 cm的仿生機(jī)器人����,采用圓柱形凸輪機(jī)構(gòu)驅(qū)動六根觸手,模擬水母的“噴射推進(jìn)”動作�����。外部覆蓋一層高彈性硅膠膜����,不僅防水耐腐蝕����,還能增強(qiáng)推進(jìn)效率�。
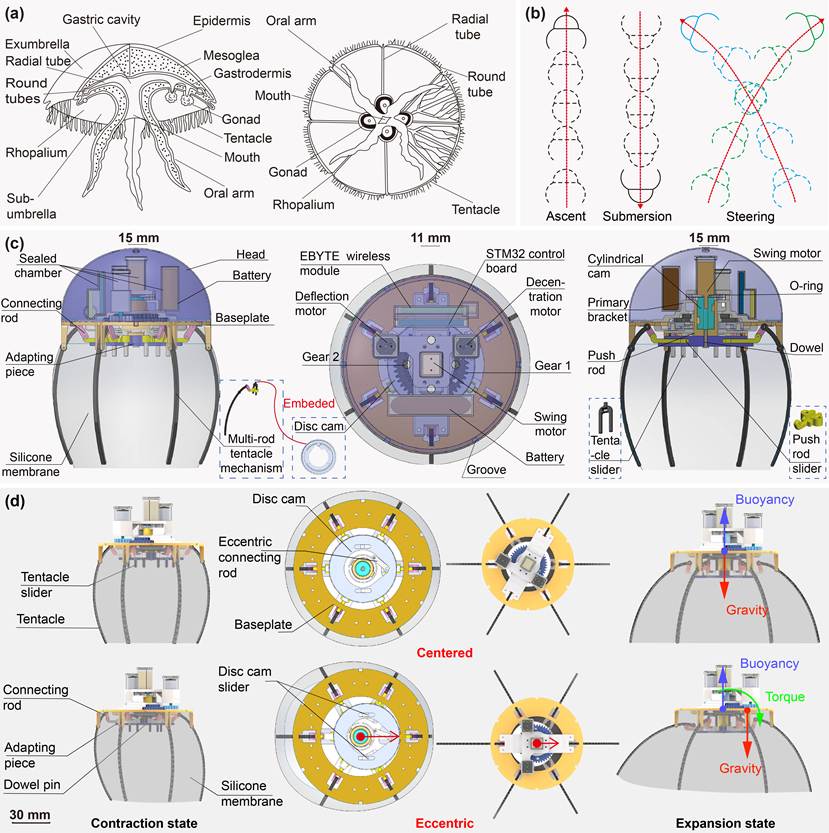
圖1 從水母到機(jī)器人系統(tǒng)的仿生映射
(二)不對稱觸手:靈活轉(zhuǎn)向的關(guān)鍵
傳統(tǒng)水下機(jī)器人轉(zhuǎn)向多依賴重心調(diào)整或多舵機(jī)控制�,結(jié)構(gòu)復(fù)雜�����、響應(yīng)慢����。而這個(gè)“機(jī)械水母”采用了一種更聰明的策略:通過偏心圓盤凸輪,實(shí)現(xiàn)觸手的不對稱擺動�,從而產(chǎn)生偏轉(zhuǎn)力矩���,完成轉(zhuǎn)向。簡單來說�,它就像用“劃水”方式控制方向���,不需要額外舵機(jī),結(jié)構(gòu)更緊湊����,反應(yīng)也更靈敏����。
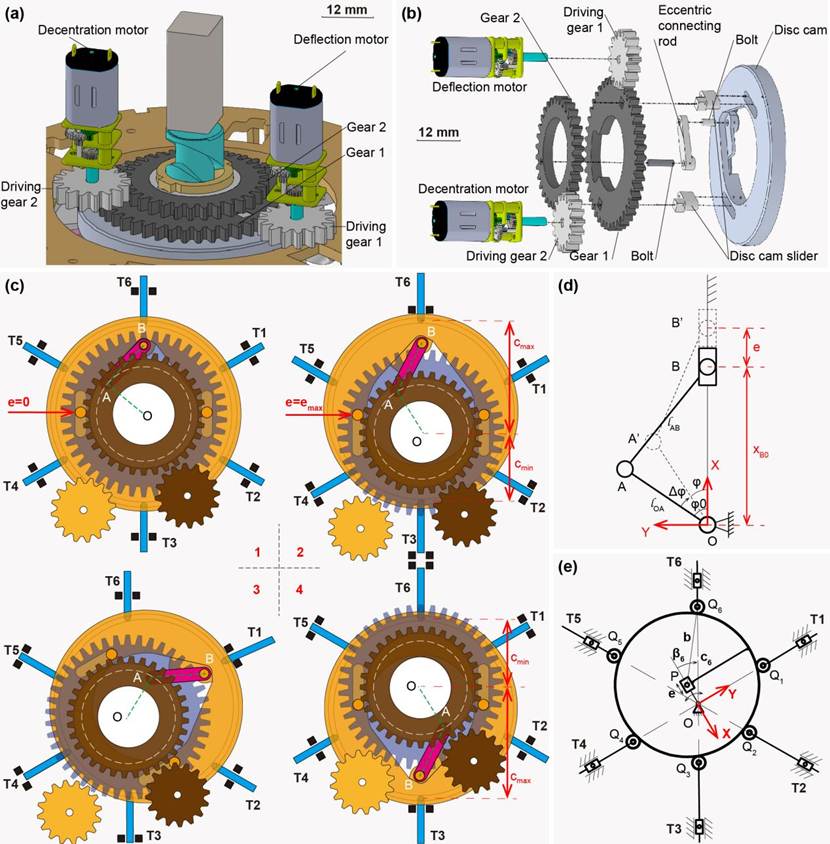
圖2 轉(zhuǎn)向機(jī)構(gòu)與操作機(jī)理
1����、怎么產(chǎn)生“不對稱”?
研究團(tuán)隊(duì)巧妙地利用一個(gè)偏心圓盤凸輪來實(shí)現(xiàn)觸手的不對稱運(yùn)動:這個(gè)凸輪的旋轉(zhuǎn)中心與機(jī)器人的幾何中心錯(cuò)開了一段距離e(0–5 mm可調(diào))���,而在凸輪圓周上均勻分布著六個(gè)滑塊-推桿��,每一個(gè)都連接著一條觸手。當(dāng)偏心距e為0時(shí)�,六個(gè)滑塊的高度一致�,觸手?jǐn)[動幅度相同,機(jī)器人直線前進(jìn)���;當(dāng)e增大到 5 mm 時(shí)�,滑塊在凸輪上的位置出現(xiàn)周期性高度差��,導(dǎo)致觸手?jǐn)[幅呈現(xiàn)出類似正弦的分布規(guī)律��,從而使得一側(cè)推力增強(qiáng)�����、另一側(cè)減弱�����,機(jī)器人便在這種非對稱推力的作用下迅速發(fā)生偏轉(zhuǎn)���。
2、怎么指哪轉(zhuǎn)哪�����?
要讓機(jī)器人朝任意方向靈活轉(zhuǎn)向�����,關(guān)鍵在于控制凸輪的偏心方向和偏心大小。論文中提出了一個(gè)“雙電機(jī)協(xié)同”控制策略:偏置電機(jī)負(fù)責(zé)將凸輪推離中心�,決定轉(zhuǎn)向的“幅度”����;偏轉(zhuǎn)電機(jī)則帶動整個(gè)凸輪繞中心軸旋轉(zhuǎn)��,決定轉(zhuǎn)向的“方向”。兩者通過固定齒輪比同步運(yùn)轉(zhuǎn)���,使得凸輪可以在360°范圍內(nèi)任意方向維持相同的偏心距����,從而實(shí)現(xiàn)全向矢量推進(jìn)。這種設(shè)計(jì)相當(dāng)于把傳統(tǒng)舵機(jī)的功能“藏”進(jìn)了觸手內(nèi)部�,無需外部舵面或復(fù)雜連桿機(jī)構(gòu)�,既節(jié)省空間��,又大幅提升響應(yīng)速度與結(jié)構(gòu)緊湊性。
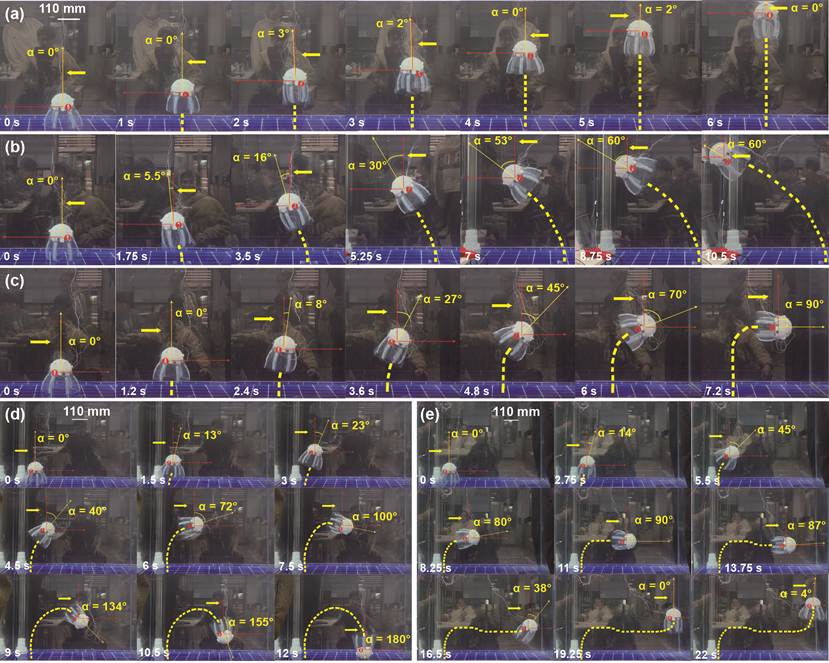
圖3 水缸運(yùn)動實(shí)驗(yàn)
(三)多場景實(shí)驗(yàn)驗(yàn)證:穩(wěn)定推進(jìn)、精準(zhǔn)轉(zhuǎn)向與生態(tài)友好表現(xiàn)
為全面驗(yàn)證仿生水母機(jī)器人在不同環(huán)境下的運(yùn)動性能與適應(yīng)能力,在室內(nèi)與戶外兩類水域開展多場景測試�。結(jié)果表明�,該機(jī)器人在從受控條件到開放自然水體中均能實(shí)現(xiàn)穩(wěn)定推進(jìn)與靈活機(jī)動��,并在實(shí)際生態(tài)環(huán)境中表現(xiàn)出極低擾動特性���。
室內(nèi)水缸測試:精細(xì)操控與復(fù)雜機(jī)動動作驗(yàn)證���。如圖3所示��,在室內(nèi)水缸實(shí)驗(yàn)中����,機(jī)器人完成了垂直升降���、90°�、180°與S形穿行等多項(xiàng)機(jī)動動作,展現(xiàn)出優(yōu)良的姿態(tài)穩(wěn)定性與方向響應(yīng)能力����。
戶外水域測試:生態(tài)友好航行與開放場景穩(wěn)定性。在戶外真實(shí)水域中���,機(jī)器人分別在公園生態(tài)池塘與開放泳池中進(jìn)行了測試����。如圖4所示�����,在生態(tài)池塘中,面對�����、底泥擾動、自然水流及自由魚群干擾等條件���,機(jī)器人仍保持穩(wěn)定航跡。得益于柔性觸手推進(jìn)方式�����,運(yùn)行噪聲低于30 dB�,未引起魚群警覺�����,實(shí)現(xiàn)近似“零擾動”航行��。在更開闊的戶外泳池環(huán)境中,機(jī)器人完成了長距離巡航與大角度轉(zhuǎn)向任務(wù),驗(yàn)證了其在中尺度環(huán)境下的穩(wěn)定推進(jìn)與航向保持能力。
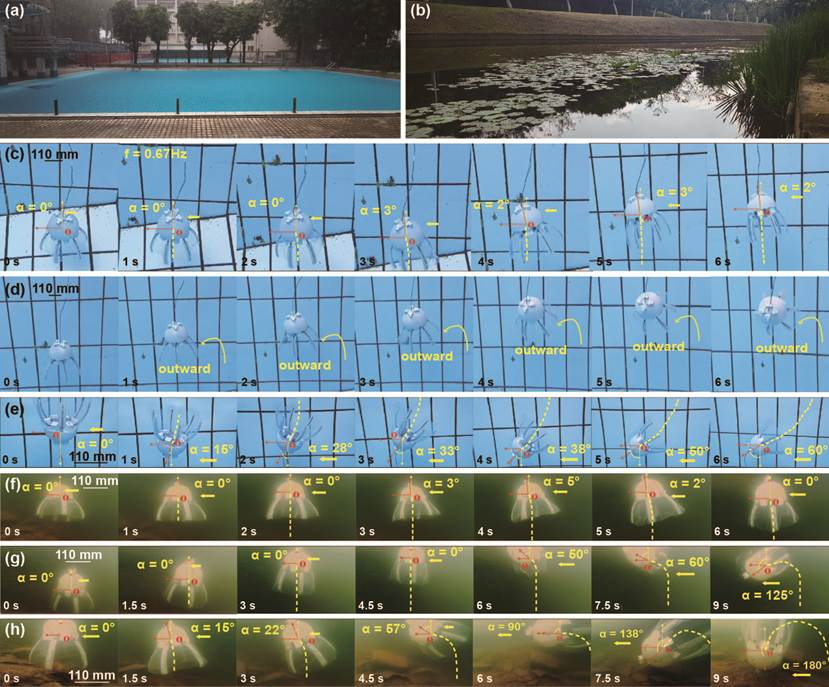
圖4 泳池和生態(tài)環(huán)境運(yùn)動實(shí)驗(yàn)
(四)總結(jié)與展望
與現(xiàn)有仿生水母機(jī)器人相比�,本研究提出的不對稱觸手驅(qū)動方案在結(jié)構(gòu)緊湊性����、轉(zhuǎn)向機(jī)動性��、能耗控制與環(huán)境適應(yīng)性方面均展現(xiàn)出明顯優(yōu)勢。通過與已有水母機(jī)器人對比可以看出���,本系統(tǒng)不僅實(shí)現(xiàn)了精確且連續(xù)的可控轉(zhuǎn)向,還在重量�����、系統(tǒng)魯棒性與生態(tài)擾動控制等方面取得兼優(yōu)表現(xiàn),進(jìn)一步證明了不對稱觸手驅(qū)動在低噪音、小尺度與隱匿性水下機(jī)器人中的潛力。
該工作得到了廣州市自然科學(xué)基金�����、國家自然科學(xué)基金�、廣東省自然科學(xué)基金、中國科協(xié)青年托舉人才工程�����、北京市自然科學(xué)基金和中央高校基本科研業(yè)務(wù)費(fèi)專項(xiàng)資金的支持�����。
論文鏈接:https://journals.sagepub.com/doi/abs/10.1177/02783649251377101
