萬(wàn)物有靈
世間奧秘蘊(yùn)藏在瑰麗的大自然里
人類(lèi)認(rèn)知自然���、師法自然
一步步探尋著前行的方向
這就是仿生的意義
2023年11月30日
國(guó)際權(quán)威期刊《科學(xué)·機(jī)器人》
報(bào)道了北京航空航天大學(xué)
機(jī)械工程及自動(dòng)化學(xué)院
仿生機(jī)器人研究團(tuán)隊(duì)
與清華大學(xué)���,新加坡國(guó)立大學(xué)合作
在仿生柔性機(jī)械臂領(lǐng)域
取得的新進(jìn)展
這種融合柔性電子的仿生機(jī)械臂
具有極高的自由度
能夠像章魚(yú)一樣抓捕物體
為應(yīng)對(duì)復(fù)雜環(huán)境下的機(jī)械作業(yè)
提供了新的方案
成果發(fā)布后
被Science官網(wǎng)圖片報(bào)道
同時(shí)被Nature官網(wǎng)News撰文報(bào)道
來(lái)自“章魚(yú)臂”的靈感
從人類(lèi)制成的第一把石斧����、第一個(gè)輪子到第一艘船舶��,從魯班受芒草啟發(fā)發(fā)明鋸子到列奧那多·達(dá)·芬奇研究鳥(niǎo)的身體構(gòu)造制作撲翼機(jī)��,再到今天的AI神經(jīng)網(wǎng)絡(luò)����、蟻群算法�,無(wú)一不印證著仿生的魅力���。那些令我們頭痛的技術(shù)難題����,大自然早已給出答案。這項(xiàng)研究成果便是從章魚(yú)臂中得到了靈感����。
軟體連續(xù)體機(jī)器人的建模、感知及控制是機(jī)器人領(lǐng)域面臨的一項(xiàng)重要挑戰(zhàn)���。軟體連續(xù)體本身具有較高的自由度和冗余度,對(duì)其非線(xiàn)性偏微分方程模型進(jìn)行數(shù)值近似求解的速度和精度難以同時(shí)保證�。而軟體連續(xù)體的環(huán)境感知?jiǎng)t存在著傳感電路與機(jī)器人本體楊氏模量(<1Gpa)匹配難、功能結(jié)構(gòu)分布設(shè)計(jì)難等問(wèn)題����。
章魚(yú)被譽(yù)為最聰明的無(wú)脊椎動(dòng)物����,也被稱(chēng)為海洋中的靈長(zhǎng)類(lèi)��。它的觸手十分靈巧��,觸手所及之空間,皆為章魚(yú)所掌控�����,這些驚人的功能為軟體機(jī)器人的研發(fā)提供了重要的思路。章魚(yú)在抓捕獵物過(guò)程中����,其細(xì)長(zhǎng)的觸手采用一種“彎曲波傳遞”的模式接近目標(biāo)����,利用高靈敏度的觸手/吸盤(pán)神經(jīng)進(jìn)行感知并快速捕獲目標(biāo)。模仿生物章魚(yú)的這種獨(dú)特的捕食行為�,可為軟體連續(xù)體機(jī)器人的感知和與環(huán)境交互提供參考����。
探秘章魚(yú)臂的抓捕機(jī)制
早在2015年���,文力課題組就開(kāi)啟了關(guān)于仿生章魚(yú)臂的研究�����。起初�,他們將目光聚焦于章魚(yú)臂的末端部分�,就“章魚(yú)觸手如何吸附、如何抓取”這個(gè)問(wèn)題一探究竟����,發(fā)現(xiàn)觸手末端必須有一定的錐度才能“手到擒來(lái)”�。而在大范圍����、大空間的應(yīng)用場(chǎng)景中�����,僅靠觸手末端是遠(yuǎn)遠(yuǎn)不夠的���。為了使機(jī)械臂可以真的像章魚(yú)一般“心靈手巧”���,團(tuán)隊(duì)開(kāi)展了更進(jìn)一步的研究����。
于是�,研究團(tuán)隊(duì)購(gòu)買(mǎi)了多批章魚(yú)�����,在實(shí)驗(yàn)室人工創(chuàng)設(shè)出海水環(huán)境,精心培育、耐心觀察,逐漸熟知章魚(yú)的生物習(xí)性,并通過(guò)高速相機(jī)等專(zhuān)業(yè)設(shè)備進(jìn)行觀測(cè),獲取生物運(yùn)動(dòng)學(xué)數(shù)據(jù)�����,然后探索數(shù)據(jù)背后章魚(yú)抓捕物體的具體機(jī)制��。
章魚(yú)對(duì)生存環(huán)境要求苛刻,充足的氧氣�����、良好的水質(zhì)和充足的資源才能讓章魚(yú)“賓至如歸”。除此之外,章魚(yú)又好奇心滿(mǎn)滿(mǎn)���,一不留神就“溜出缸外”����,離開(kāi)適宜的環(huán)境后很快就會(huì)死亡。觀測(cè)數(shù)據(jù)同樣不易獲取����,章魚(yú)并不會(huì)一直做出研究所需要的抓捕動(dòng)作�。負(fù)責(zé)生物章魚(yú)捕食觀測(cè)的博士生陳勃翰說(shuō):“章魚(yú)有比較明顯的情緒特征����,抓捕動(dòng)作得看章魚(yú)心情,不僅要琢磨好章魚(yú)的性子��,還得持之以恒進(jìn)行觀察”�。
圖1:生物章魚(yú)觀測(cè)
圖2:生物章魚(yú)臂的趨近(Reaching)模式和掃掠(Sweeping)模式
根據(jù)生物章魚(yú)的觀測(cè)數(shù)據(jù)�,課題組發(fā)現(xiàn),章魚(yú)觸手的抓捕動(dòng)作采取“彎曲波傳遞”的方式����,“很像我們揮舞長(zhǎng)鞭����,指令從鞭子根部像波一樣傳導(dǎo)到末端”���,然后通過(guò)高度敏感的觸手/吸盤(pán)神經(jīng)網(wǎng)絡(luò)觸發(fā)停止和抓取信號(hào),對(duì)物體進(jìn)行抓取并拉回���。
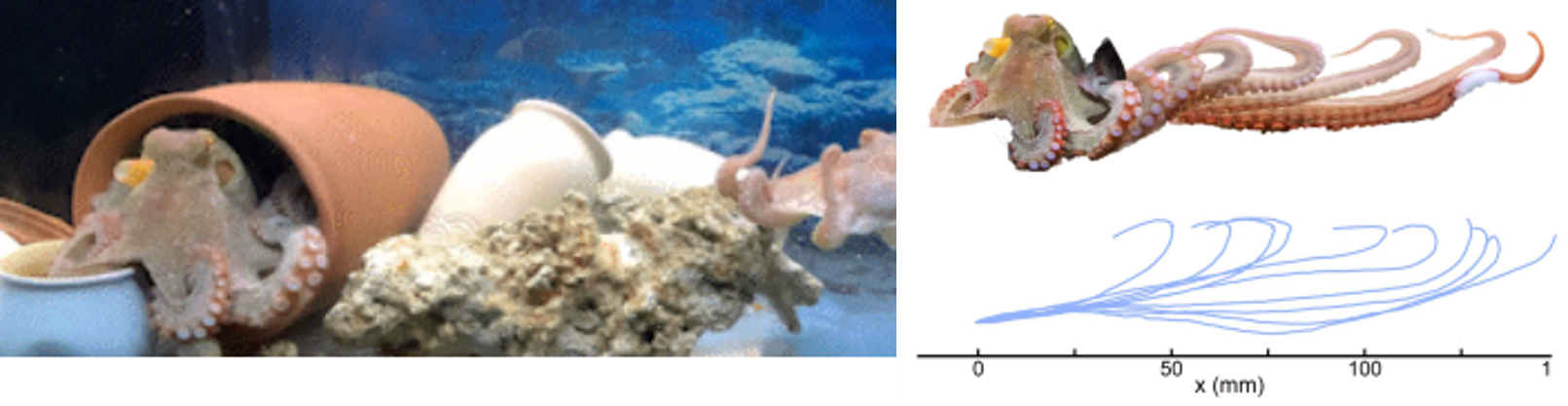
圖3:章魚(yú)觸手的“彎曲波傳遞”抓捕動(dòng)作
攻克三大研究難關(guān)
盡管章魚(yú)臂抓捕機(jī)制已經(jīng)明晰,然而距離實(shí)現(xiàn)和章魚(yú)臂一樣能夠自主感知環(huán)境�����、作出決策并執(zhí)行操作的軟體機(jī)器人系統(tǒng)�,研究團(tuán)隊(duì)還需要攻克三大難關(guān)。
一��、“彎曲波傳遞”模型
第一個(gè)難關(guān)是如何通過(guò)數(shù)學(xué)建模的方式將章魚(yú)臂的“彎曲波傳遞”抓捕機(jī)制應(yīng)用到自主研制的仿生章魚(yú)臂樣機(jī)控制中�����。建模的第一步是用簡(jiǎn)潔的數(shù)學(xué)語(yǔ)言搭建生物學(xué)模型����,從機(jī)器人控制的角度�,要求不能建立結(jié)構(gòu)過(guò)于復(fù)雜的模型����。第二步是構(gòu)建具有連續(xù)體構(gòu)型特點(diǎn)的機(jī)器人模型����。由于仿生章魚(yú)臂樣機(jī)有5個(gè)關(guān)節(jié)�,16個(gè)自由度�,其冗余自由度要遠(yuǎn)高于剛性機(jī)械臂。此外�����,機(jī)器人驅(qū)動(dòng)器主要由柔性材料構(gòu)成,其材料特有的超彈性特征也對(duì)機(jī)器人的建模與控制提出很高的要求��。

圖4:仿生章魚(yú)臂的“彎曲波傳遞”模型
研究團(tuán)隊(duì)經(jīng)常聚在一起頭腦風(fēng)暴,許多奇思妙想就是這樣誕生的�����。在解決數(shù)學(xué)建模的問(wèn)題上�����,博士生劉嘉琦巧妙引入玫瑰線(xiàn)方程,以簡(jiǎn)潔而美觀的形式進(jìn)行了刻畫(huà)��。玫瑰線(xiàn)方程源于中世紀(jì)航海羅盤(pán),形似玫瑰�,在極坐標(biāo)下只有α���、k��、θ三個(gè)變量��,和彎曲波傳遞的運(yùn)動(dòng)軌跡有極高的吻合度��。在這一模型的指導(dǎo)下,仿生章魚(yú)觸手抓持器與多段軟體臂的組合可以在大范圍、不同方向和距離的情況下自動(dòng)進(jìn)行抓捕操作。

圖5:傳遞式驅(qū)動(dòng)邏輯下的“彎曲波傳遞”目標(biāo)物抓捕
二、集成液態(tài)金屬電子系統(tǒng)
如何實(shí)現(xiàn)機(jī)器人在高柔順大拉伸狀態(tài)下對(duì)自身狀態(tài)及外部環(huán)境的精準(zhǔn)感知�,這是面臨的第二個(gè)難關(guān)�����。人類(lèi)只有一個(gè)大腦��,而章魚(yú)足足有九個(gè)��,每一條章魚(yú)臂上也有自己的神經(jīng)系統(tǒng)。章魚(yú)觸手通過(guò)吸盤(pán)感知到接觸的物體時(shí)�,會(huì)迅速纏繞,然后將信號(hào)傳導(dǎo)到觸手的大腦中進(jìn)行控制����,這是生物中的一種分布式智能����。章魚(yú)的觸手極為靈敏���,所有可以?huà)叩降牡胤蕉际钦卖~(yú)的抓捕空間����,這與章魚(yú)獨(dú)立控制的方式帶來(lái)的高效決策、迅速抓捕是分不開(kāi)的����。負(fù)責(zé)仿章魚(yú)神經(jīng)感知系統(tǒng)的博士生袁菲陽(yáng)提到�����,“我們希望機(jī)械臂可以像章魚(yú)觸手一樣���,有自己的神經(jīng)系統(tǒng)�����?!?/span>
生物章魚(yú)臂的形變程度可以達(dá)到200%—300%�,不僅可以拉伸,還可以自如地收縮����、彎曲、膨脹���。傳統(tǒng)剛性電路板制成的機(jī)器人難以實(shí)現(xiàn)這些力學(xué)性能�����,因此�,研究團(tuán)隊(duì)采用液態(tài)金屬柔性電路,為大變形軟體機(jī)器人集成具有多種傳感(例如彎曲����、吸力�����、溫度)及自主信號(hào)處理能力的大拉伸電子系統(tǒng)�。在此期間,團(tuán)隊(duì)還解決了柔性基底與硬質(zhì)芯片在大拉伸狀態(tài)下易產(chǎn)生剝離的問(wèn)題���,通過(guò)嵌入中間硬度的緩沖材料,有效地降低了芯片連接面處的應(yīng)變,提高了柔性電路的拉伸率���。經(jīng)過(guò)增強(qiáng)后����,簡(jiǎn)單柔性電路單元在拉伸至710%的狀態(tài)下仍能正常工作��,對(duì)于集成傳感以及電子元件的復(fù)雜電路���,其拉伸性也從140%提升到了360%�。
圖6:柔性電路單項(xiàng)拉伸測(cè)試
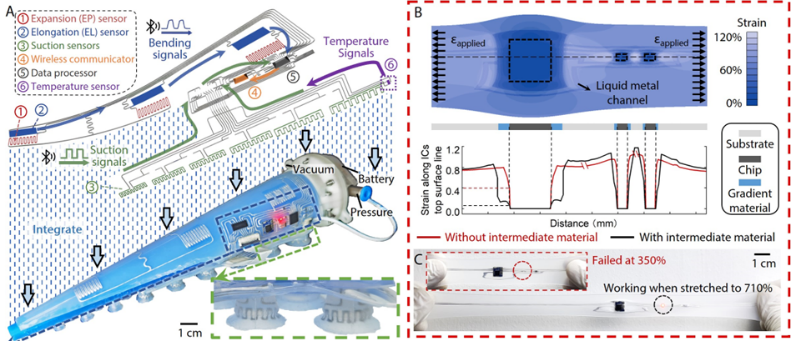
圖7:集成液態(tài)金屬電子系統(tǒng)的仿生章魚(yú)觸手抓持器
這種增強(qiáng)的柔性電路不僅能夠在單一軸上承受大幅拉伸應(yīng)變,而且還具備對(duì)多軸拉伸應(yīng)變的適應(yīng)能力。更為引人注目的是�����,這種柔性電路不僅僅被動(dòng)地適應(yīng)變形�����,而且能夠通過(guò)感知人的交互進(jìn)行主動(dòng)響應(yīng)和相應(yīng)的變形���。這種智能化的柔性電路為軟體機(jī)器人的實(shí)時(shí)環(huán)境感知和主動(dòng)決策創(chuàng)造了強(qiáng)有力的基礎(chǔ)。
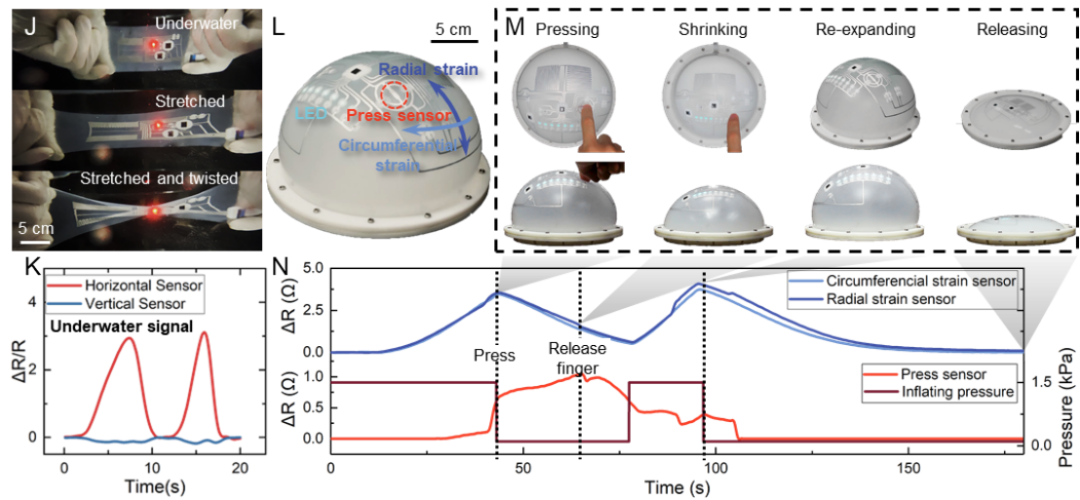
圖8:可交互的柔性高延展電子皮膚
三、柔性觸覺(jué)裝置
第三個(gè)難關(guān)是將仿生機(jī)械臂的感知信息準(zhǔn)確反饋到人身上�,進(jìn)一步實(shí)現(xiàn)自然、直觀的人機(jī)交互���。章魚(yú)即使視力很差����,依舊能憑借出色的感知力成為高超的捕食者���,研究團(tuán)隊(duì)從中汲取靈感,制作了基于大拉伸電子電路的可穿戴柔性觸覺(jué)裝置��,用于感知和控制仿生章魚(yú)臂�����。柔性吸附觸覺(jué)指套的設(shè)計(jì)與制作主要由博士生田路峰負(fù)責(zé)�����,指套內(nèi)側(cè)嵌有吸盤(pán)結(jié)構(gòu)����,當(dāng)抓持器吸盤(pán)吸附上物體時(shí)����,信號(hào)傳遞到指套�����,指套內(nèi)嵌吸盤(pán)會(huì)產(chǎn)生負(fù)壓,在手指上同步產(chǎn)生吸附觸覺(jué)��,將機(jī)器人觸覺(jué)傳遞到人手���。柔性指套的引入不僅為用戶(hù)提供了更直觀���、自然的控制手段�,而且通過(guò)無(wú)線(xiàn)通信與仿生章魚(yú)觸手抓持器實(shí)現(xiàn)了高效的協(xié)同作業(yè)���。
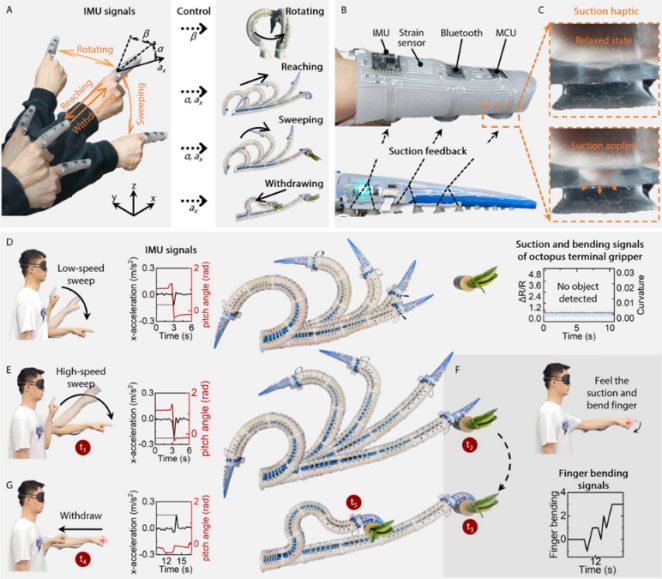
圖9:柔性觸覺(jué)指套控制仿生章魚(yú)觸手
持續(xù)探索未來(lái)應(yīng)用
功夫不負(fù)有心人�,一個(gè)活靈活現(xiàn)����,可以像章魚(yú)一樣抓取、決策的仿生機(jī)械臂已然完成����。然而考慮到水下捕獲��、咽拭子檢測(cè)等實(shí)際應(yīng)用場(chǎng)景要求仿生軟體機(jī)器人能夠在更廣闊的空間中自由運(yùn)轉(zhuǎn)����,研究團(tuán)隊(duì)并未停下探索的腳步���。
起初����,制成的機(jī)械臂只能在二維平面內(nèi)進(jìn)行捕獲、抓取����,在三維空間的實(shí)際應(yīng)用中顯得捉襟見(jiàn)肘。章魚(yú)的視力很差�����,抓捕空間卻極大����,原因在于章魚(yú)高超的捕食技巧:在感知到物體后,章魚(yú)會(huì)控制觸手以波傳遞方式觸及物體�,掃掠范圍大���、十分敏捷�����;一次抓捕方向不正確�����,會(huì)扭頭迅速調(diào)整方向��,進(jìn)行二次抓捕�����。受此啟發(fā),研究團(tuán)隊(duì)巧用輪盤(pán)�,在仿生機(jī)械臂的底部增加了一個(gè)自由度�,這樣便“二維變?nèi)S,困途變坦途”����。研究團(tuán)隊(duì)演示了在人為控制下的水下三維空間內(nèi)對(duì)移動(dòng)物體的抓捕。
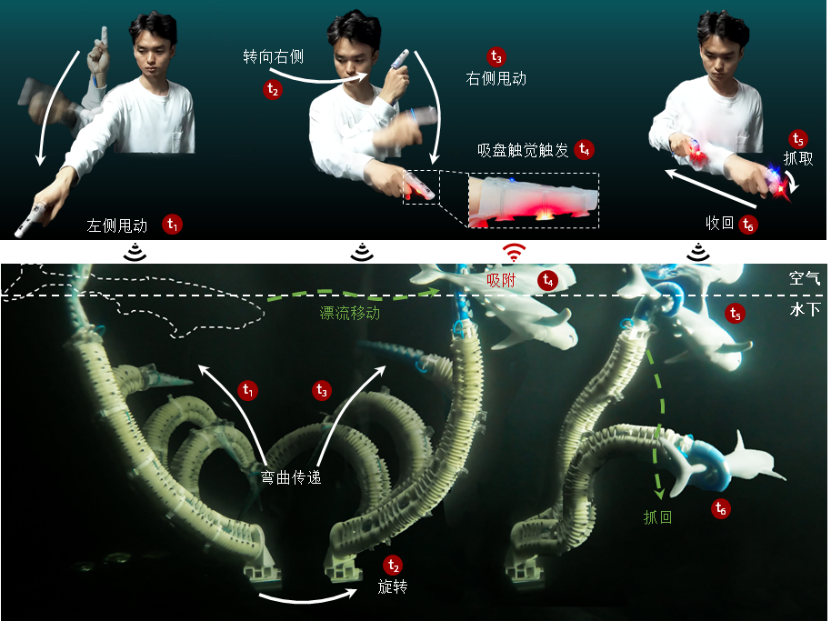
圖10����、圖11:人控制仿生章魚(yú)觸手抓持水下移動(dòng)物體
這項(xiàng)研究建立了軟體機(jī)器人、人類(lèi)和環(huán)境之間的統(tǒng)一交互模式���,并拓寬了可拉伸電子集成的仿生自主系統(tǒng)在大空間內(nèi)的交互操作方式�,為我國(guó)柔性機(jī)器人的交互式應(yīng)用提供了新的前景與發(fā)展思路��。
項(xiàng)目作者及團(tuán)隊(duì)信息
這項(xiàng)研究涵蓋了多個(gè)研究領(lǐng)域,涉及生物學(xué)和機(jī)器人學(xué)等多方面的交叉�。謝哲新���、袁菲陽(yáng)、劉嘉琦����、田路峰為論文的共同第一作者�,北航丁希侖教授���、清華大學(xué)張一慧教授、新加坡國(guó)立大學(xué)Cecilia Laschi教授為論文的合作作者�����。文力為論文的通訊作者�����。北航為研究論文的第一/通訊單位��。本項(xiàng)目得到了國(guó)家自然科學(xué)基金項(xiàng)目、創(chuàng)新研究群體等項(xiàng)目的支持�。
(轉(zhuǎn)自:北京航空航天大學(xué)公眾號(hào))
