多姿多彩的大自然為人類科技文明的發(fā)展提供了源源不斷的靈感與動(dòng)力��。仿生學(xué)就是這樣一門(mén)“以自然為師”的科學(xué)。
2022年5月19日�����,國(guó)際頂級(jí)期刊《科學(xué)·機(jī)器人》(Science Robotics)雜志報(bào)道了北京航空航天大學(xué)機(jī)械工程及自動(dòng)化學(xué)院仿生機(jī)器人研究團(tuán)隊(duì)文力課題組在跨介質(zhì)吸附仿生機(jī)器人領(lǐng)域取得的新進(jìn)展�����。
這種跨介質(zhì)吸附仿生機(jī)器人能從水里“飛”到空中����,是一種跨水空的無(wú)人航行器�,為未來(lái)的高性能跨介質(zhì)無(wú)人系統(tǒng)提供了新的思路�����。成果發(fā)布后���,登上Science官網(wǎng)圖片頭條!
這也是北航仿生機(jī)器人研究團(tuán)隊(duì)文力教授課題組在《Science Robotics》上發(fā)表的第3篇論文��。這是一項(xiàng)怎樣的仿生學(xué)成果?讓我們從一條小小的魚(yú)說(shuō)起���。
2017 仿生魚(yú)軟體吸盤(pán)機(jī)器人
海洋中有一種奇特的生物����,名為魚(yú)�����,它們頭部扁平,上面有一個(gè)形似“鞋印”的橢圓形吸盤(pán)�。魚(yú)用自己的吸盤(pán)吸附船底或其它大魚(yú)遠(yuǎn)游和索食�,因此也常被稱作海中的“旅行家”和“搭便車高手”。
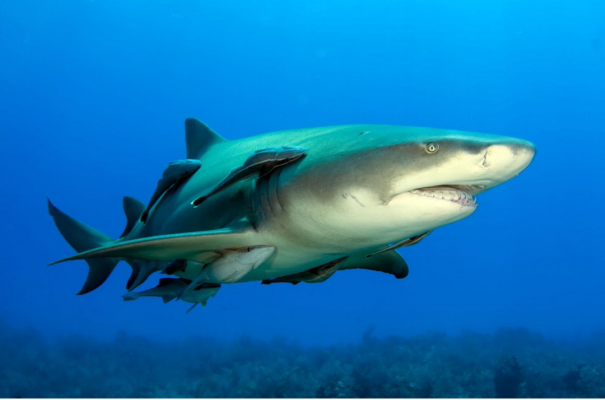
魚(yú)利用頭部吸盤(pán)吸附在鯊魚(yú)身體上“搭便車”(圖片來(lái)源于網(wǎng)絡(luò))
2013年�����,正在研究3D打印鯊魚(yú)皮的文力就關(guān)注到了這條常常在鯊魚(yú)皮上緊緊吸附的小魚(yú)。文力馬上想到����,如果能復(fù)刻魚(yú)在水下極強(qiáng)的吸附能力����,并將其運(yùn)用到機(jī)器人身上�,是否也能極大程度減小機(jī)器人工作中的消耗能量���?隨即展開(kāi)了深入的研究。
歷時(shí)四年���,這項(xiàng)以小魚(yú)為靈感的”仿生魚(yú)軟體吸盤(pán)機(jī)器人”作為我國(guó)首篇論文登上了國(guó)際機(jī)器人研究領(lǐng)域的權(quán)威期刊《科學(xué)·機(jī)器人》(Science Robotics)封面。
在四年的研究過(guò)程中�����,課題組攻克了還原吸盤(pán)結(jié)構(gòu)、制作錐狀小刺�、實(shí)現(xiàn)鰭片微動(dòng)三大技術(shù)難關(guān)���,終于成功研制出吸附力可達(dá)自重340倍的“仿生魚(yú)軟體吸盤(pán)機(jī)器人”�。這項(xiàng)研究工作不僅從生物力學(xué)角度揭示了魚(yú)的吸附機(jī)制�����,同時(shí)也在水下救援以及海洋生態(tài)監(jiān)測(cè)等軍民領(lǐng)域中具有良好的前景��。
初代吸盤(pán)機(jī)器人樣機(jī)存在機(jī)器人移動(dòng)范圍?�。ㄓ捎诰€纜限制)�、吸附復(fù)雜表面難(如破損��、曲面、粗糙度高的表面)�����、機(jī)器人的機(jī)動(dòng)性不足等關(guān)鍵問(wèn)題���。因此���,課題組并未就此止步����。
2022 跨介質(zhì)仿生吸附機(jī)器人
在進(jìn)一步的研究中�����,研究人員發(fā)現(xiàn)了一種有趣的現(xiàn)象——當(dāng)海豚躍出水面試圖甩掉吸附于身體上的魚(yú)時(shí),魚(yú)依然可以牢牢地附著在海豚身體上�。該現(xiàn)象讓課題組意識(shí)到——魚(yú)吸盤(pán)不僅能夠應(yīng)用于水下環(huán)境,在空氣中也具備優(yōu)秀的吸附性能����。因此,課題組開(kāi)始探索仿生魚(yú)吸盤(pán)和跨水空介質(zhì)無(wú)人航行器結(jié)合的可能性。

海豚躍出水面試圖甩脫?jù)擊~(yú)時(shí)�,魚(yú)依然可以緊緊地附著在海豚表面(圖片來(lái)源:Maxence Atzori)
潛在需求廣泛
機(jī)器人在高度非結(jié)構(gòu)化環(huán)境中的應(yīng)用����,比如進(jìn)行多地形觀測(cè)����、多介質(zhì)作業(yè)、多環(huán)境探查等��,對(duì)機(jī)器人快速跨介質(zhì)運(yùn)動(dòng)(擴(kuò)大工作范圍)和高效暫棲(延長(zhǎng)工作時(shí)間)的能力有著廣泛的潛在需求��。
相比于傳統(tǒng)的飛行機(jī)器人����,跨介質(zhì)仿生吸附機(jī)器人可長(zhǎng)時(shí)間工作�����,并同時(shí)覆蓋水下和空中的運(yùn)動(dòng)范圍,這在探索基礎(chǔ)科學(xué)問(wèn)題��,研制具有潛在用途的高性能跨域航行器方面具有重要意義��。
兩大研究挑戰(zhàn)
機(jī)器人實(shí)現(xiàn)水下和空中吸附主要面臨兩大挑戰(zhàn):
1)需要強(qiáng)力����、可逆、自適應(yīng)性強(qiáng)的吸附裝置��,該裝置可以同時(shí)在水下和空中發(fā)揮作用�,使機(jī)器人可以在各種表面上高效吸/脫附�,并可以產(chǎn)生足夠的切向力來(lái)抵抗高速來(lái)流的沖擊;
2)需要可以快速�����、連續(xù)�����、穩(wěn)定跨越水/空界面的無(wú)纜機(jī)器人,用于搭載吸附裝置和工作設(shè)備�����。

而此次發(fā)現(xiàn)魚(yú)在跨介質(zhì)環(huán)境中展現(xiàn)出的優(yōu)秀吸附性能����,為跨介質(zhì)仿生吸附機(jī)器人的研制提供了可行的方向�。
攻克挑戰(zhàn)一:冗余吸附機(jī)理
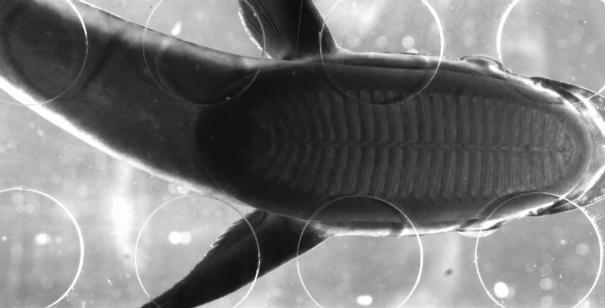
通過(guò)實(shí)驗(yàn)室條件下對(duì)生物魚(yú)吸盤(pán)的觀察,課題組發(fā)現(xiàn)�,魚(yú)只依靠吸盤(pán)的一部分即可吸附在帶孔的表面上�。課題組利用生物觀測(cè)手段揭示了魚(yú)吸盤(pán)吸附復(fù)雜表面、實(shí)現(xiàn)長(zhǎng)時(shí)間吸附的新機(jī)理——鰭片獨(dú)立腔體�、靜水壓增強(qiáng)的冗余吸附機(jī)理(圖1)�。通過(guò)多個(gè)仿生對(duì)照組研究發(fā)現(xiàn)����,吸盤(pán)內(nèi)部對(duì)稱排列的鰭片之間可以形成獨(dú)立的密閉腔體����,進(jìn)行局部吸附�;而外部柔軟的唇圈也可以形成整體的吸附�����,實(shí)現(xiàn)冗余吸附�。當(dāng)靜水壓增強(qiáng)驅(qū)動(dòng)鰭片主動(dòng)旋轉(zhuǎn)時(shí),鰭片頂端的大量微刺結(jié)構(gòu)可以和吸附表面互鎖�����,增強(qiáng)摩擦力來(lái)克服剪切力�,但微刺結(jié)構(gòu)不會(huì)破壞獨(dú)立鰭片腔體的吸附���。傳統(tǒng)吸盤(pán)裝置對(duì)泄漏和外部沖擊很敏感,而魚(yú)吸盤(pán)在水下和空中的冗余和適應(yīng)性吸附��,將摩擦力和吸附時(shí)間分別提升了44%和458%���。該新機(jī)理的揭示對(duì)實(shí)現(xiàn)仿生機(jī)器人在各種表面上長(zhǎng)時(shí)間“搭便車”具有重要意義。
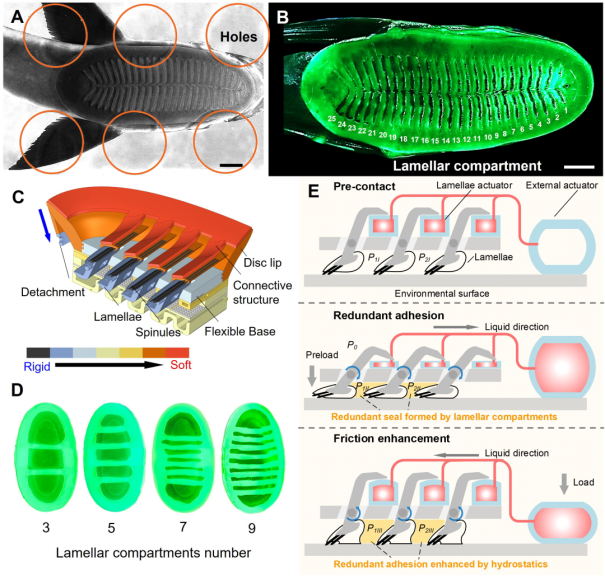
圖1. 魚(yú)吸盤(pán)的形態(tài)學(xué)特征、仿生結(jié)構(gòu)及冗余吸附機(jī)理:(A)魚(yú)可以依靠局部吸盤(pán)吸附附著在水族箱側(cè)面的多孔表面上��;(B)魚(yú)吸盤(pán)附著在空中透明玻璃上的FTIR圖像(背側(cè)視圖)�,綠色熒光區(qū)域表示吸盤(pán)與玻璃基板接觸的位置; 鰭片間暗黑色區(qū)域表示吸盤(pán)的獨(dú)立腔體�,它們與表面沒(méi)有接觸;(C)仿生魚(yú)吸盤(pán)樣機(jī)的CAD模型(長(zhǎng)度:87 mm����,寬度:46 mm)�����;(D)FTIR圖像顯示具有不同鰭片數(shù)量的仿生吸盤(pán)和吸附表面的接觸情況���;(E)魚(yú)吸盤(pán)冗余吸附的三個(gè)階段��。
攻克挑戰(zhàn)二:可折疊螺旋槳
為了解決水/空無(wú)縫跨越的挑戰(zhàn),機(jī)器人需要在水和空氣之間進(jìn)行穩(wěn)定�、連續(xù)、快速的跨越�,并可以在這兩種介質(zhì)中航行����。水和空氣兩種介質(zhì)的巨大差異性,導(dǎo)致跨介質(zhì)特征成為研究的難點(diǎn)���。
基于吸附各種非水平復(fù)雜表面的需求�,機(jī)器人平臺(tái)需要具有高機(jī)動(dòng)性能����,旋翼機(jī)器人成為最優(yōu)選擇���,前人對(duì)旋翼機(jī)器人的水/空跨越難題�,多采用復(fù)雜低效的共軸串列旋翼布局或額外的浮力裝置解決方案���,并且缺乏對(duì)水空跨越過(guò)程的詳細(xì)討論�。本項(xiàng)目研究發(fā)現(xiàn),由于螺旋槳在兩種不同介質(zhì)中的工作轉(zhuǎn)速區(qū)間差異巨大�,旋翼機(jī)器人從水面進(jìn)入空氣的瞬間會(huì)經(jīng)歷升力驟減的過(guò)程,縮短螺旋槳轉(zhuǎn)速在水/空界面處的變化周期是實(shí)現(xiàn)旋翼機(jī)器人快速跨越介質(zhì)的一個(gè)重要因素��。這使得機(jī)器人從水下(低轉(zhuǎn)速)跨越到空中(高轉(zhuǎn)速)時(shí)需要快速增加螺旋槳的旋轉(zhuǎn)速度��,以產(chǎn)生足夠的推力讓機(jī)器人飛出水面。
課題組創(chuàng)新性地設(shè)計(jì)了一種簡(jiǎn)單�、低成本的可折疊螺旋槳�,其在水下可以自適應(yīng)折疊,在空中可以被動(dòng)展開(kāi)��。使得螺旋槳在兩種介質(zhì)中的工作轉(zhuǎn)速區(qū)間減小����,縮短了工作轉(zhuǎn)速的切換時(shí)間���。相比于使用普通螺旋槳����,機(jī)器人的跨越介質(zhì)時(shí)間縮短了61.1%�,顯著提升了機(jī)器人跨越水/空界面的速度���。
在此基礎(chǔ)上,結(jié)合仿生魚(yú)吸盤(pán)和高機(jī)動(dòng)的四旋翼無(wú)人機(jī)����,課題組研制了一款能夠跨水/空吸附、無(wú)纜的仿生機(jī)器人(圖2)����。其利用自適應(yīng)變形的折疊槳葉可以在水/空介質(zhì)之間實(shí)現(xiàn)穩(wěn)定�����、連續(xù)���、快速跨越切換(0.35 s)�����,連續(xù)跨介質(zhì)出入水單次循環(huán)時(shí)間為2.9 s����;利用冗余吸附的仿生魚(yú)吸盤(pán)能夠高效吸附復(fù)雜表面(彎曲、粗糙��、不完整����、生物污染表面等)保持長(zhǎng)時(shí)間吸附,實(shí)現(xiàn)“搭便車”(Hitchhiking)�。
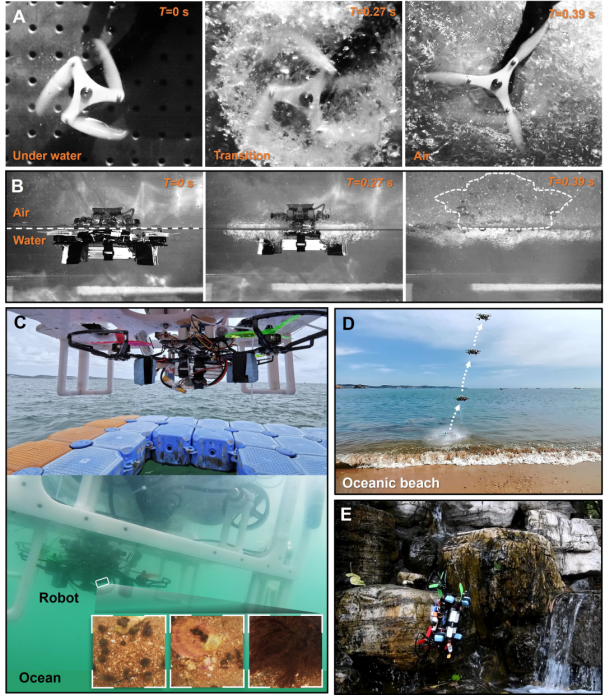
圖2. 水/空搭便車機(jī)器人跨介質(zhì)性能及其野外應(yīng)用:(A)自折展螺旋槳在跨越水/空過(guò)程的變化,水下折疊狀態(tài)�����,水/空界面逐漸展開(kāi)��,空氣中完全展開(kāi)��;(B)機(jī)器人在實(shí)驗(yàn)室水箱中從水下跨越到空中的高速相機(jī)時(shí)序圖像�����;(C)機(jī)器人附著在運(yùn)動(dòng)“宿主”(遙控?zé)o人潛水器)的底部�����,機(jī)載相機(jī)觀測(cè)海底生物�����;(D)機(jī)器人在海灘中飛躍出波浪水面��;(E)機(jī)器人吸附在濕滑的��、水流沖擊的巖石表面。
水/空搭便車機(jī)器人能抵抗較大的外部法向和切向力�����,使機(jī)器人能夠“暫棲”在靜止表面或“搭便車”到運(yùn)動(dòng)的物體上,從而延長(zhǎng)工作時(shí)間���,擴(kuò)大工作范圍�����。與空中保持懸停狀態(tài)相比�,仿生機(jī)器人的搭便車狀態(tài)的能量消耗減小了約50倍���,與水下的游動(dòng)相比�����,搭便車的能耗消耗減小了約19倍。
應(yīng)用前景廣闊
在野外環(huán)境中�,該機(jī)器人可以在海洋和峽谷溪流中跨越介質(zhì)���,并且可以分別吸附在運(yùn)動(dòng)的船底和濕滑的巖石表面�����,進(jìn)行穩(wěn)定的觀測(cè)任務(wù)(圖2)����。此外��,該機(jī)器人在特定的開(kāi)放環(huán)境中具有潛在的應(yīng)用前景�����,包括長(zhǎng)期的水下和空中觀測(cè)��、跨介質(zhì)抓取���、水下結(jié)構(gòu)檢查�����、海洋生物調(diào)查�����、冰山環(huán)境檢測(cè)等(圖3)����?�?缃橘|(zhì)仿生吸附機(jī)器人擴(kuò)展了飛行機(jī)器人的作業(yè)范圍和任務(wù)時(shí)間,并為未來(lái)的高性能跨介質(zhì)無(wú)人系統(tǒng)提供新的思路��。
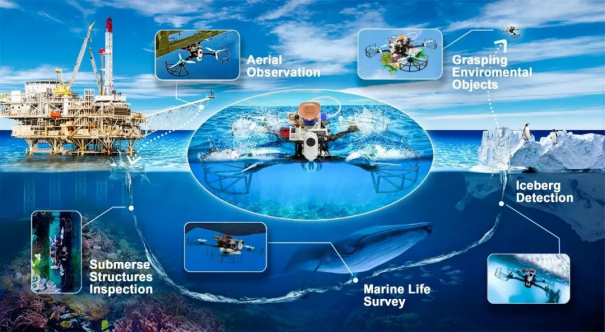
圖3. 水/空搭便車機(jī)器人及其任務(wù)概況:機(jī)器人能夠在水下和空中跨越��,并牢固地附著在各種表面上��,使其能夠在自然環(huán)境中執(zhí)行長(zhǎng)期任務(wù)。圖片作者:莫硯如(北航國(guó)際通用工程學(xué)院2018級(jí)本科生)
項(xiàng)目作者及團(tuán)隊(duì)信息
在本研究中,北航機(jī)械工程及自動(dòng)化學(xué)院2018級(jí)博士研究生李磊為第一作者�,王思奇、張以遠(yuǎn)����、宋善源為共同第一作者,文力教授為論文唯一通訊作者�;北京航空航天大學(xué)為第一/通訊單位���,英國(guó)帝國(guó)理工學(xué)院為合作單位����。此研究得到國(guó)家自然科學(xué)基金創(chuàng)新群體項(xiàng)目“機(jī)器人仿生基礎(chǔ)理論與關(guān)鍵技術(shù)”、科技部重大研發(fā)計(jì)劃“智能機(jī)器人”專項(xiàng)等項(xiàng)目的資助�����。
Science Robotics論文鏈接:https://www.science.org/doi/10.1126/scirobotics.abm6695
(可下載)https://www.science.org/stoken/author-tokens/ST-498/full
轉(zhuǎn)自:航小萱
微信公眾號(hào)文章鏈接:https://mp.weixin.qq.com/s/FzRbZJvQKKFYEmaf440Ikg
