機械學院專欄《科苑·星壇》第十六期準時啟航�!本期將為大家介紹阮思樸老師�。阮老師長期致力于服務機器人、機器人運動與路徑規(guī)劃���、模仿學習�����、具身智能等前沿方向����,在未知場景中的機器人操作����、狹小空間運動規(guī)劃等領域取得了多項創(chuàng)新成果。本期將為本科生提供“受限空間內服務機器人操作技能具身學習”小微項目����,歡迎對機器人智能控制�、路徑規(guī)劃、人工智能等領域充滿興趣的同學加入��,共同推動機器人技術向更智能����、更靈巧、更自主的方向邁進���!
01 個人簡介

阮思樸�����,北航機械工程及自動化學院機器人研究所教授���、博導、國家級青年人才�。主要研究方向包括服務機器人��、機器人運動及路徑規(guī)劃、模仿學習�、具身智能、計算幾何等�����。2021-2024年曾任新加坡國立大學機械工程系博士后研究員��。2020年于美國約翰霍普金斯大學獲機械工程博士學位���。本科畢業(yè)于哈爾濱工業(yè)大學機械工程專業(yè)���。主持國家自然科學基金項目,以項目骨干身份參與美國NSF��、美國ONR���、新加坡NRF等科研項目�。發(fā)表IEEE T-RO��、IEEE RA-L�����、Research、CJME�、IEEE CVPR、IEEE ICRA在內的學術論文20余篇���。擔任中國計算機學會智能機器人專委會執(zhí)行委員��、Robot Learning青年編委�,ICRA��、IROS副編輯��,IROS會議分會場主席����。
02 學術成果
1)未見場景中機器人操作具身模仿學習
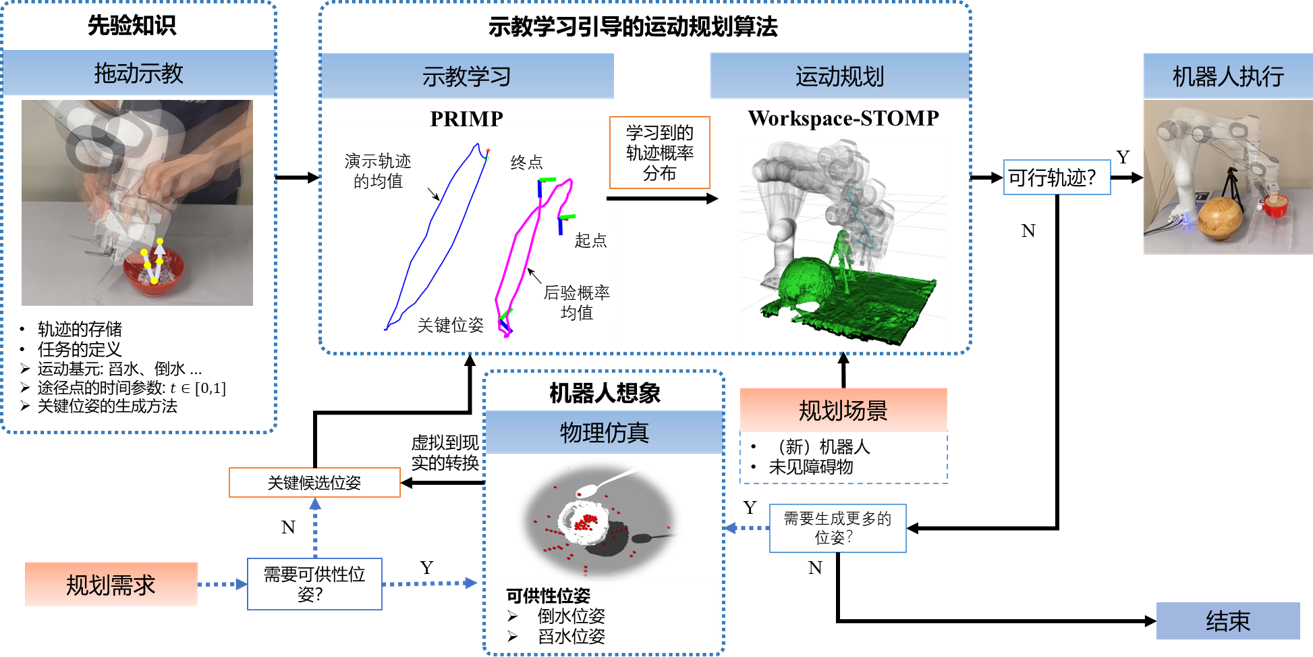
面向機器人在未知居家場景中執(zhí)行復雜操作任務的需求,本研究提出了一種基于概率模型的模仿學習方法PRIMP(PRobabilistically-Informed Motion Primitives)與基于工作空間密度的機械臂軌跡規(guī)劃算法Workspace-STOMP���。通過學習物品可供性,在虛擬環(huán)境中模擬倒水����、舀水等動作,得到機器人完成特定任務所需的關鍵末端六維位姿��,從而生成全新操作軌跡�����,引導機器人操縱物品�����。所提出的算法提升了類人操作軌跡生成效率����、新環(huán)境中避障成功率及任務完成度���。相關成果發(fā)表于IEEE Transactions on Robotics (T-RO)期刊上�����。
2)狹小受限空間內機器人運動規(guī)劃
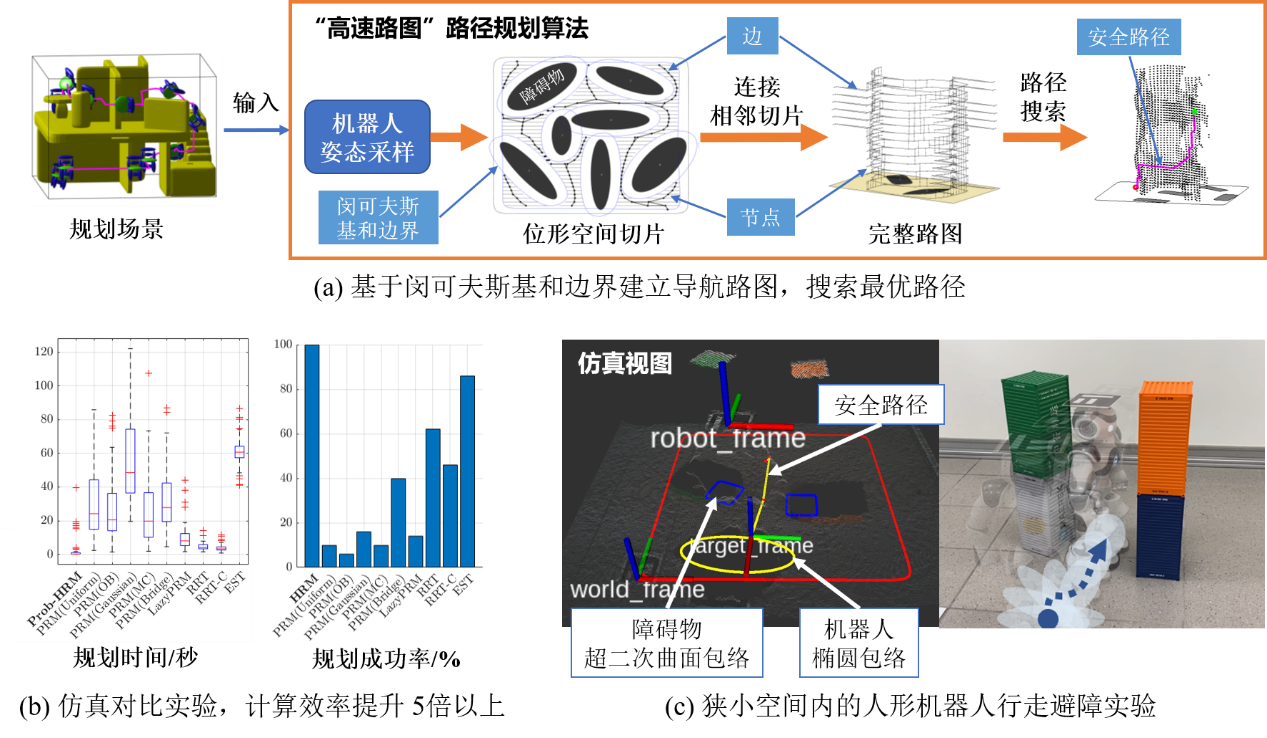
該項目提出了“高速路圖(Highway Roadmap,HRM)”的路徑規(guī)劃算法�,運用幾何方法解決了機器人路徑規(guī)劃中關鍵的“狹窄空間”和“高自由度”的問題��。其核心基于無碰撞位形空間邊界的解析解���。將機器人包絡成橢球的集合��,環(huán)境中的障礙物表示為具有光滑表面的嚴格凸體(例如超二次曲面)�。通過計算位形空間障礙物邊界���,為機器人了提供無碰撞環(huán)境的先驗經驗�,從而避免生成對于機器人無效的位形。進而�,結合基于隨機采樣的路徑規(guī)劃算法��,突破了高維問題中計算復雜度高的瓶頸�,將所提的方法延伸到了多自由度的機器人上。相關成果發(fā)表在IEEE Transactions on Robotics (T-RO)期刊上�����。
03 項目介紹
受限空間內服務機器人操作技能具身學習
1)項目簡介
隨著勞動成本的提升���、社會老齡化程度的加重,服務機器人的快速研發(fā)與升級成為迫切需求�����,在家庭服務����、醫(yī)療康養(yǎng)����、助老助殘等貼近人們生活的領域起到舉足輕重的作用��。本研究主要面向服務機器人在復雜非結構化環(huán)境中高效精準操作的重大需求��,聚焦三維場景感知與建模����、動態(tài)環(huán)境中運動與路徑規(guī)劃���、復雜操作技能的類人模仿學習等方向�����,進行服務機器人抓取與操作的理論�、算法與應用研究�。
2)主要工作
完成機器人物品抓取算法設計
完成機器人自主操作任務的相關算法設計與實現
配合碩博研究生完成算法對比實驗
搭建并調試服務機器人樣機系統(tǒng)
3)所需能力
具有良好的微積分�、線性代數���、概率統(tǒng)計等理論基礎
了解機器人運動學��、路徑規(guī)劃
運動控制、機器人學習相關算法
掌握Python���、C++等編程語言
了解Ubuntu、ROS2等系統(tǒng)
4)聯系方式
電子郵箱:ruansp@buaa.edu.cn
