機(jī)械學(xué)院專欄《科苑·星壇》第十五期準(zhǔn)時(shí)啟航�����!本期將為大家介紹石狄老師�。石老師深耕運(yùn)動(dòng)康復(fù)與助力外骨骼機(jī)器人領(lǐng)域,在三維步態(tài)參數(shù)化生成���、人機(jī)交互自適應(yīng)控制�、多場(chǎng)-雙環(huán)按需輔助控制等方向取得多項(xiàng)創(chuàng)新性成果,成功破解外骨骼機(jī)器人與人體三維步態(tài)匹配�����、人機(jī)協(xié)調(diào)性不足等核心難題����。本期特為本科生帶來(lái) “柔性可穿戴外骨骼機(jī)器人系統(tǒng)設(shè)計(jì)” 小微項(xiàng)目�,誠(chéng)邀具備機(jī)械、電子或控制類相關(guān)知識(shí)���,熱愛多學(xué)科交叉探索�����、擁有良好團(tuán)隊(duì)協(xié)作能力的同學(xué)加入���,推動(dòng)柔性外骨骼機(jī)器人技術(shù)在康復(fù)訓(xùn)練���、助老助行等場(chǎng)景的創(chuàng)新突破與實(shí)際應(yīng)用�。
01 個(gè)人簡(jiǎn)介

石狄�����,博士,副教授�����,博士生導(dǎo)師���。博士畢業(yè)于北京航空航天大學(xué)機(jī)械工程機(jī)自動(dòng)化學(xué)院����,主講課程《機(jī)器人技術(shù)基礎(chǔ)》《人形機(jī)器人技術(shù)基礎(chǔ)與前沿》《空間機(jī)構(gòu)非線性動(dòng)力學(xué)與控制》等���。長(zhǎng)期致力于運(yùn)動(dòng)康復(fù)與助力外骨骼機(jī)器人相關(guān)研究��,主持和參與國(guó)家自然科學(xué)基金項(xiàng)目��、國(guó)家重點(diǎn)研發(fā)計(jì)劃等縱向項(xiàng)目6項(xiàng)以及相關(guān)橫向課題5項(xiàng),發(fā)表高水平論文20余篇(含ESI高被引論文1篇)����,獲2022年中國(guó)機(jī)械工程學(xué)會(huì)優(yōu)秀論文獎(jiǎng)和北航校級(jí)優(yōu)秀博士學(xué)位論文���、機(jī)械工程學(xué)報(bào)第五屆高影響力論文獎(jiǎng)����。
02 學(xué)術(shù)成果
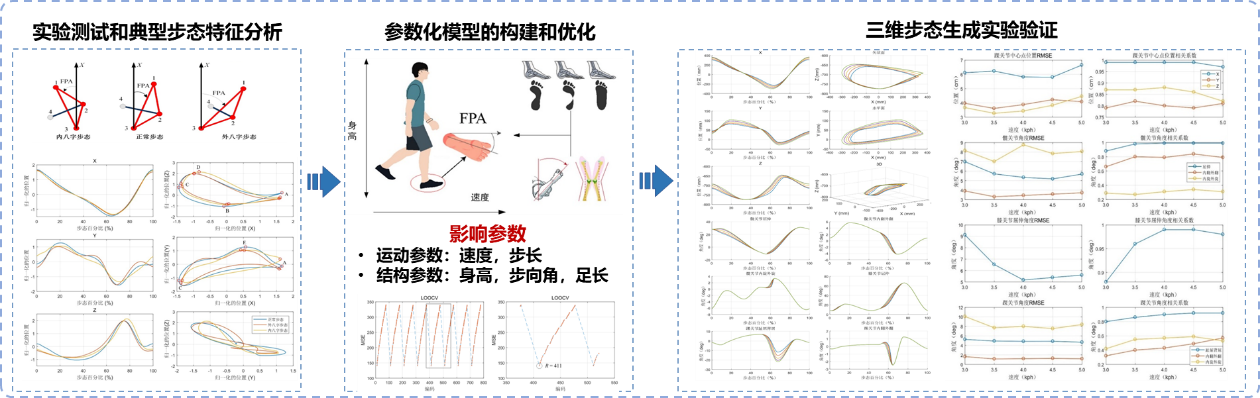
1)三維步態(tài)參數(shù)化生成
分析了運(yùn)動(dòng)��、結(jié)構(gòu)參數(shù)對(duì)三維步態(tài)的影響規(guī)律,提出了一種三維步態(tài)的參數(shù)化生成方法�,實(shí)現(xiàn)了適應(yīng)人體不同運(yùn)動(dòng)和結(jié)構(gòu)特征的三維步態(tài)生成����,解決了目前多數(shù)外骨骼機(jī)器人生成的平面步態(tài)與人體三維步態(tài)特性以及人體運(yùn)動(dòng)結(jié)構(gòu)特征匹配性不足的問(wèn)題�。
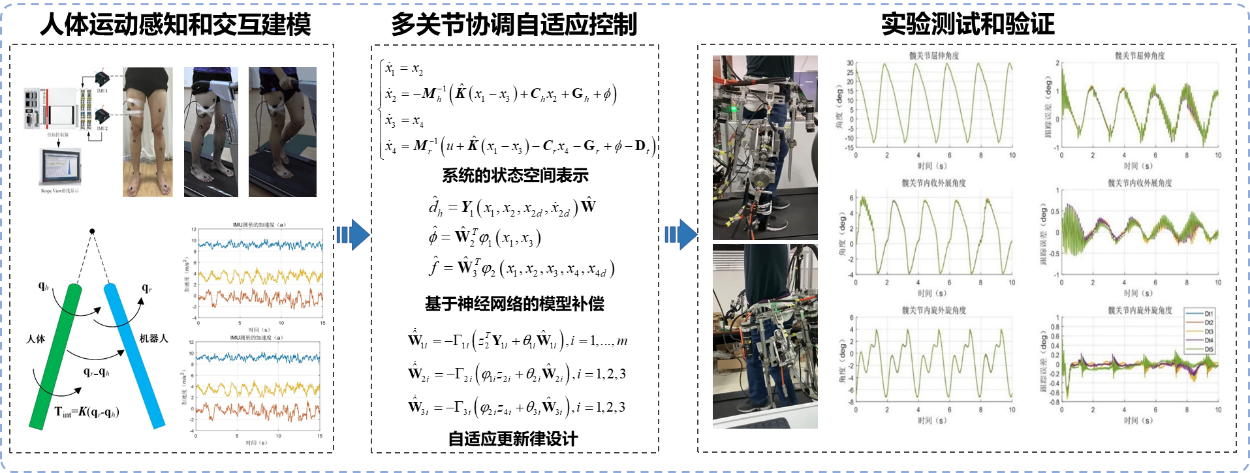
2)以人為中心的人機(jī)交互自適應(yīng)控制方法
分析了人機(jī)交互作用機(jī)理�,綜合考慮了參數(shù)不確定性和系統(tǒng)建模準(zhǔn)確性對(duì)系統(tǒng)誤差的影響��,提出了一種針對(duì)串并混聯(lián)外骨骼機(jī)器人的以人為中心的多關(guān)節(jié)協(xié)調(diào)自適應(yīng)控制方法��,解決了由于忽略人機(jī)之間實(shí)際運(yùn)動(dòng)偏差帶來(lái)的被動(dòng)控制模式下人機(jī)順應(yīng)性不足的問(wèn)題�����。
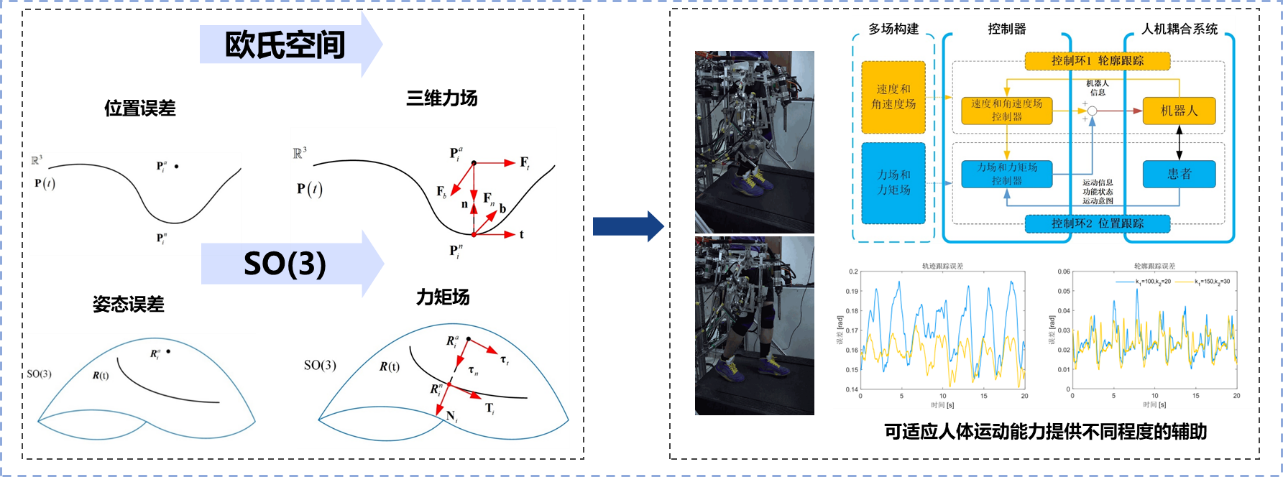
3)多場(chǎng)-雙環(huán)的按需輔助控制方法
面向三自由度關(guān)節(jié)的主動(dòng)康復(fù)訓(xùn)練����,綜合考慮了人機(jī)運(yùn)動(dòng)偏差對(duì)系統(tǒng)誤差的影響,提出了一種基于多場(chǎng)-雙環(huán)的控制構(gòu)架的按需輔助主動(dòng)控制方法����,解決了目前主動(dòng)控制方法主要面向平面步態(tài)而不是三維步態(tài)帶來(lái)的人機(jī)協(xié)調(diào)性不足的問(wèn)題����。
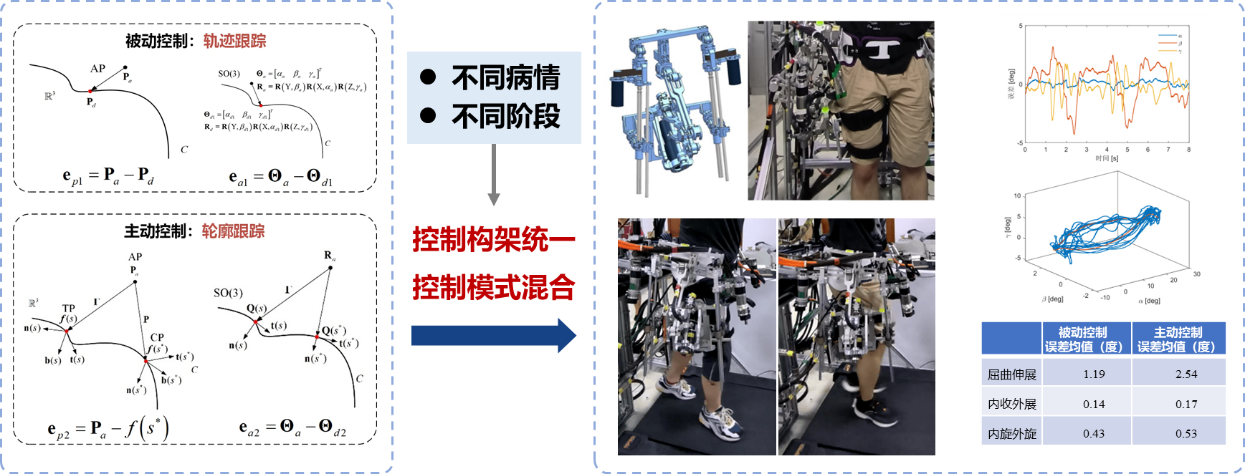
4)主被動(dòng)結(jié)合的混合切換控制方法
揭示了機(jī)器人輔助力矩對(duì)患者姿態(tài)的影響規(guī)律,提出了主被動(dòng)模式下的輪廓/軌跡跟蹤誤差表達(dá)及其跟蹤控制方法�,實(shí)現(xiàn)了多模式混合控制���,進(jìn)行了可穿戴實(shí)驗(yàn)驗(yàn)證�����,提升了機(jī)器人輔助康復(fù)訓(xùn)練過(guò)程與不同病情階段的適應(yīng)性��。
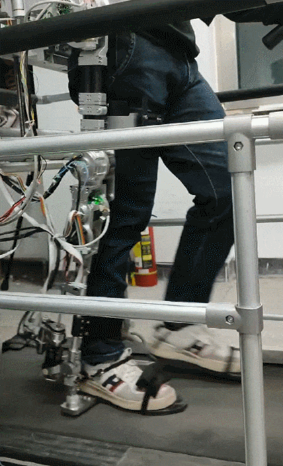
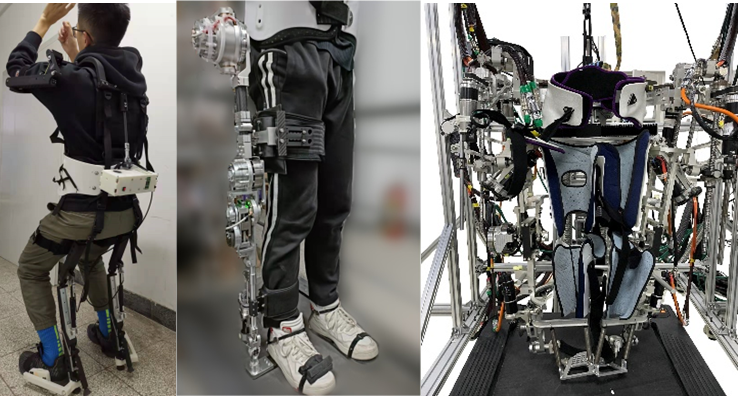
5)外骨骼機(jī)器人樣機(jī)研制和測(cè)試
03 項(xiàng)目介紹
1)項(xiàng)目簡(jiǎn)介
柔性可穿戴外骨骼機(jī)器人突破傳統(tǒng)剛性外骨骼機(jī)器人的局限�,在康復(fù)訓(xùn)練�����、助老助行、運(yùn)動(dòng)增強(qiáng)等場(chǎng)景具有顯著優(yōu)勢(shì)�。本項(xiàng)目擬融合新型材料、柔性驅(qū)控���、具身智能等前沿技術(shù),在結(jié)構(gòu)驅(qū)動(dòng)�、智能感知��、人機(jī)協(xié)調(diào)控制等方面展開探索性探究���,構(gòu)建新型柔性外骨骼機(jī)器人系統(tǒng)
2)所需能力
機(jī)械��、電子或控制類相關(guān)知識(shí)
多學(xué)科交叉問(wèn)題探索能力
團(tuán)隊(duì)協(xié)作能力
3)相關(guān)事項(xiàng)
項(xiàng)目周期:3-6個(gè)月
所需人數(shù):1-3名本科生
4)聯(lián)系方式
電子郵箱:shidi@buaa.edu.cn
04 老師寄語(yǔ)
感謝同學(xué)們關(guān)注��,期待同學(xué)們加入
共同成長(zhǎng)����,進(jìn)步��!
