機(jī)械學(xué)院專欄《科苑·星壇》第十四期準(zhǔn)時(shí)啟航!本期將為大家介紹任子宇老師。任老師長期深耕仿生機(jī)器人與生物力學(xué)、面向醫(yī)療場景的微型軟體機(jī)器人等前沿方向,在磁性軟材料微加工�����、小尺度多模態(tài)運(yùn)動機(jī)理��、仿生流體操控等領(lǐng)域取得了多項(xiàng)成果����。本期將為本科生提供“微小型仿生軟體機(jī)器人的運(yùn)動控制研究”小微項(xiàng)目,歡迎對機(jī)器人����、智能材料、生物力學(xué)等領(lǐng)域充滿熱情的同學(xué)加入����,共同助力機(jī)器人技術(shù)向更柔韌�、更智能��、更融合的方向發(fā)展!
01 個(gè)人簡介

任子宇�����,博士,北京航空航天大學(xué)機(jī)械工程及自動化學(xué)院教授����,博士生導(dǎo)師����,國家級青年人才����。本科����、碩士畢業(yè)于北京航空航天大學(xué)機(jī)械工程及自動化學(xué)院�����,博士畢業(yè)于瑞士蘇黎士聯(lián)邦理工學(xué)院/德國馬克斯普朗克智能系統(tǒng)所�����,在德國馬克斯普朗克智能系統(tǒng)所物理智能系進(jìn)行博士后研究����。教授課程《離散數(shù)學(xué)》《離散數(shù)學(xué)(進(jìn)階)》《AI賦能機(jī)器人技術(shù)》《Mechatronics Engineering》�。從事仿生機(jī)器人與生物力學(xué)�����、面向醫(yī)療場景的微型軟體機(jī)器人等研究�。近年來主持并參與國家自然科學(xué)基金等項(xiàng)目�。在包括Science Robotics����、Science Advances、Nature Communications�、PNAS、TMECH等期刊發(fā)表論文40余篇��,ESI高被引論文2篇��,入選工業(yè)工程與自動化領(lǐng)域2025年全球前2%頂尖科學(xué)家榜單。獲2015年CLAWAR會議最佳技術(shù)論文獎(jiǎng),2019年機(jī)器人頂級會議RSS最佳論文獎(jiǎng)����,蘇黎世聯(lián)邦理工學(xué)院的優(yōu)秀博士學(xué)位論文獎(jiǎng)(ETH獎(jiǎng)?wù)拢?/span>
02 學(xué)術(shù)成果
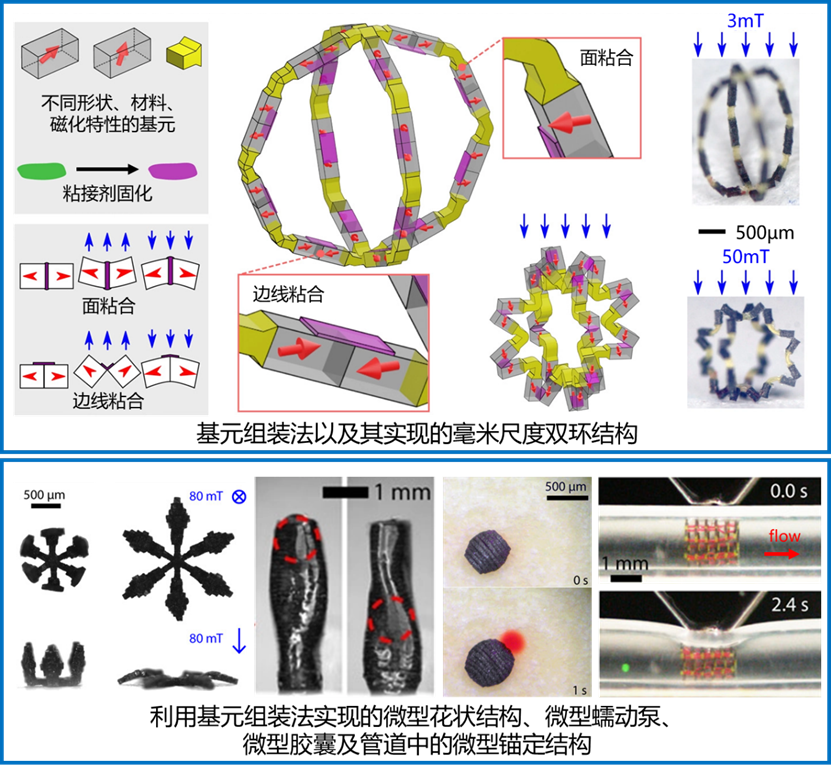
(1) 磁性軟材料微加工技術(shù)
針對現(xiàn)有微型軟體磁驅(qū)機(jī)器人受限于加工技術(shù),難以實(shí)現(xiàn)復(fù)雜三維形狀��、非均一材料構(gòu)成及磁化方向預(yù)編程,從而導(dǎo)致運(yùn)動與功能受限的問題��,提出了一種微組裝基元加工方法���,建立了從有限元結(jié)構(gòu)設(shè)計(jì)����、基元離散制造到利用微模具克服表面力干擾的精密組裝工藝流程,實(shí)現(xiàn)了亞毫米至毫米尺度下具有復(fù)雜材料分布與特定磁化特征的微型醫(yī)療機(jī)器人(如微型蠕動泵�、膠囊及錨定結(jié)構(gòu)等)�,并進(jìn)一步將相關(guān)技術(shù)推廣至微米尺度,實(shí)現(xiàn)了微米級磁性雙面微粒的組裝及復(fù)雜三維微結(jié)構(gòu)的高精度制造�。
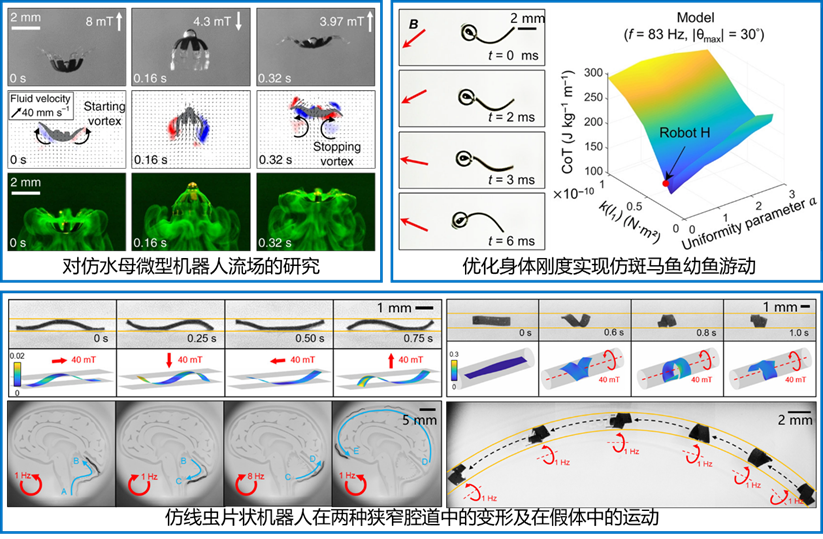
(2) 小尺度多模態(tài)仿生軟體運(yùn)動機(jī)理研究
針對面向醫(yī)療應(yīng)用的微型軟體磁驅(qū)機(jī)器人在體內(nèi)復(fù)雜流體環(huán)境(如靜態(tài)液體腔體、動態(tài)流速水域及狹窄充液管腔等)中運(yùn)動能力受限的問題�����,汲取自然界微小生物的運(yùn)動機(jī)理指導(dǎo)仿生設(shè)計(jì),建立了中雷諾數(shù)下的流固耦合模型與機(jī)器人動力學(xué)理論,揭示了仿水母游動中的渦旋輔助非接觸操控機(jī)制����、仿斑馬魚高頻游動中的剛度-效率匹配規(guī)律�����,以及仿線蟲在受限空間內(nèi)利用被動形變與環(huán)境交互的推進(jìn)機(jī)理��,實(shí)現(xiàn)了具備多模態(tài)運(yùn)動�����、選擇性物質(zhì)輸運(yùn)及復(fù)雜狹腔適應(yīng)能力的一系列微型仿生軟體機(jī)器人��。
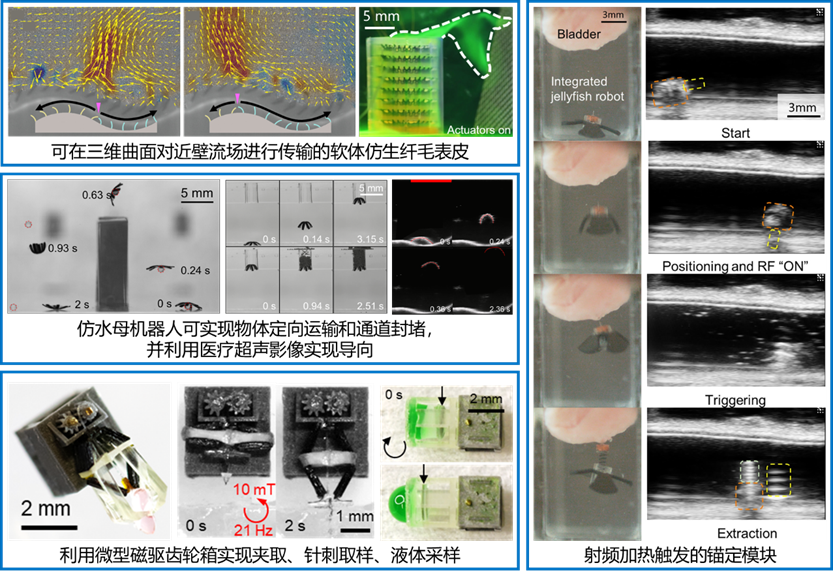
(3) 仿生流體操控與微型功能模塊的原理���、設(shè)計(jì)與實(shí)現(xiàn)方法
針對微型軟體機(jī)器人因受限于加工工藝�����、載荷體積及供能控制而難以集成復(fù)雜醫(yī)療功能的問題�,提出了基于軟體本體運(yùn)動調(diào)控流場的功能增強(qiáng)策略與高功率密度微型模塊集成方案�,建立了利用電控仿生纖毛陣列對近壁流場進(jìn)行多維靈活操控的方法���,實(shí)現(xiàn)了基于改進(jìn)型仿水母機(jī)器人的藥物輸運(yùn)、腔道封堵及超聲引導(dǎo)下定點(diǎn)貼附����;研制了高減速比微型磁驅(qū)齒輪箱�����,突破了小尺度下磁驅(qū)動力不足的限制,實(shí)現(xiàn)了針刺活檢與液體采集����;提出了基于射頻電場加熱的遠(yuǎn)程觸發(fā)機(jī)制,開發(fā)了按需錨定與靶向給藥模塊��,解決了磁驅(qū)運(yùn)動與功能觸發(fā)信號間的耦合干擾難題�。
03 項(xiàng)目介紹
(1) 項(xiàng)目簡介:
微小型仿生軟體機(jī)器人的運(yùn)動控制研究
軟體機(jī)器人具有超冗余自由度及連續(xù)體變形特征�����,其運(yùn)動模式與環(huán)境存在強(qiáng)烈的非線性耦合��,使得基于模型的傳統(tǒng)控制方法難以適用�。相比之下�����,自然界微小生物雖神經(jīng)系統(tǒng)簡單���,卻能借助“形態(tài)計(jì)算”機(jī)制���,通過神經(jīng)回路與身體結(jié)構(gòu)的動態(tài)耦合實(shí)現(xiàn)高效運(yùn)動����。因此,揭示微小生物的神經(jīng)-形態(tài)協(xié)同機(jī)理����,構(gòu)建融合具身智能的新型仿生控制架構(gòu)�����,是實(shí)現(xiàn)微小型軟體機(jī)器人高效�����、魯棒控制的各種亟待突破的關(guān)鍵課題。
(2) 所需能力:
(a) 具備機(jī)電系統(tǒng)構(gòu)建與機(jī)器人軟硬件集成的基本能力
(b) 具備線性代數(shù)���、數(shù)理統(tǒng)計(jì)或機(jī)器學(xué)習(xí)等學(xué)科的基本數(shù)理素養(yǎng)
(c) 具備對科學(xué)問題進(jìn)行長期鉆研與深入思考的潛質(zhì)
(3) 相關(guān)事項(xiàng)
(a) 項(xiàng)目周期:6個(gè)月-1年
(b) 所需人數(shù):1-3名本科生
(4) 聯(lián)系方式
電子郵箱:renzy@buaa.edu.cn
04 老師寄語
愿同學(xué)們懷揣對未知的好奇與求索����,擁有大膽想象與即刻行動的魄力����!
