機(jī)械學(xué)院專(zhuān)欄《科苑·星壇》第十三期準(zhǔn)時(shí)啟航��!本期將為大家介紹馮仰剛老師。馮老師長(zhǎng)期致力于可穿戴機(jī)器人�����、柔性傳感與人機(jī)交互等前沿交叉領(lǐng)域��,在機(jī)器人智能康復(fù)��、人機(jī)共融控制等方面取得了多項(xiàng)創(chuàng)新成果。本期將為本科生提供“主被動(dòng)一體無(wú)源等速機(jī)器人的原理探究和設(shè)計(jì)評(píng)估”和“柔性光學(xué)波導(dǎo)傳感與人機(jī)交互研究”小微項(xiàng)目�����。歡迎感興趣的同學(xué)加入���,共同探索可穿戴機(jī)器人的前沿應(yīng)用��!
01 個(gè)人簡(jiǎn)介

馮仰剛����,副教授���,博士生導(dǎo)師�����,2019年7月博士畢業(yè)于北京大學(xué)���,可穿戴機(jī)器人方向�����,同年9月加入東京大學(xué)��,任東京大學(xué)特別研究員,2021年5月加入北航機(jī)械學(xué)院機(jī)器人所。以一作/通訊發(fā)表15篇文章,包括IEEE TRO(2篇�,一作,機(jī)器人領(lǐng)域頂刊���,長(zhǎng)文)、Nature Communications(共同一作&共同通訊)等機(jī)器人和傳感領(lǐng)域Top期刊����,擔(dān)任IEEE TNSRE(A類(lèi)期刊)副編委。獲國(guó)家重點(diǎn)研發(fā)計(jì)劃課題�、北京市昌平區(qū)青年人才����、日本科學(xué)技術(shù)振興機(jī)構(gòu)(JST)個(gè)人資助等項(xiàng)目支持。
02 學(xué)術(shù)成果
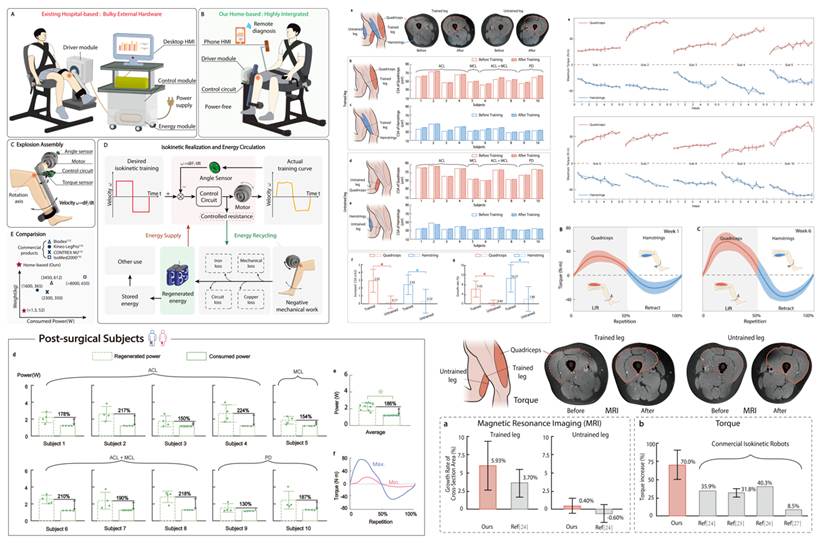
1.自供電膝關(guān)節(jié)等速訓(xùn)練機(jī)器人:
針對(duì)傳統(tǒng)等速康復(fù)機(jī)器人體積龐大,耗電量高��,價(jià)格昂貴的特點(diǎn),設(shè)計(jì)了一款針對(duì)居家康復(fù)場(chǎng)景的無(wú)源等速康復(fù)訓(xùn)練機(jī)器人。該機(jī)器人通過(guò)動(dòng)態(tài)能量再生的原理采集訓(xùn)練中的能量,結(jié)合低能耗控制方法,實(shí)現(xiàn)“無(wú)電池”的等速訓(xùn)練�����。臨床試驗(yàn)表明本研究所提出的機(jī)器人臨床康復(fù)效果達(dá)到甚至超過(guò)傳統(tǒng)等速設(shè)備。
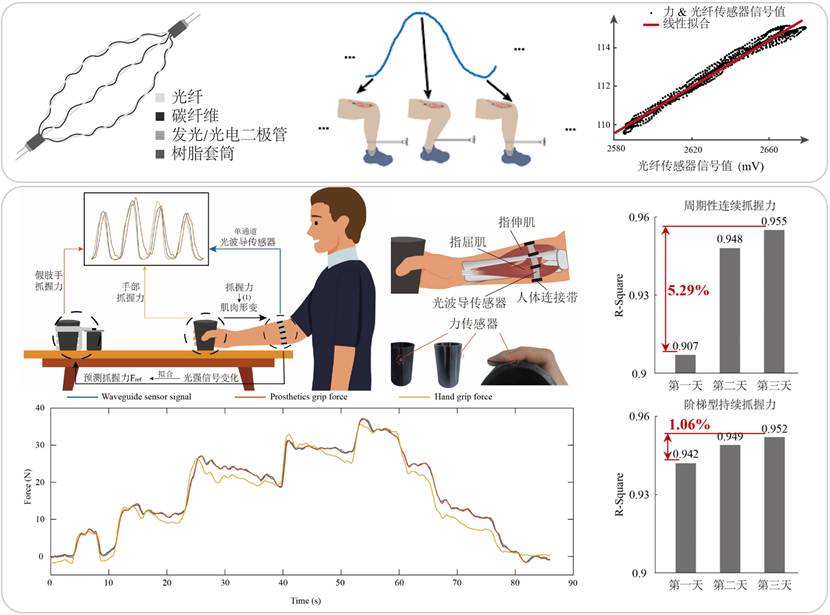
2.柔性傳感與智能穿戴康復(fù)機(jī)器人
本項(xiàng)目圍繞柔性光學(xué)波導(dǎo)傳感技術(shù),開(kāi)展人機(jī)交互與康復(fù)運(yùn)動(dòng)感知相關(guān)研究。通過(guò)設(shè)計(jì)傳感器結(jié)構(gòu)��,實(shí)現(xiàn)肌肉形變、關(guān)節(jié)運(yùn)動(dòng)及力反饋的實(shí)時(shí)監(jiān)測(cè)�。結(jié)合機(jī)器學(xué)習(xí)與神經(jīng)網(wǎng)絡(luò)算法,項(xiàng)目旨在實(shí)現(xiàn)運(yùn)動(dòng)參數(shù)的高精度識(shí)別與肌肉三維輪廓重建��,為未來(lái)的智能康復(fù)機(jī)器人與可穿戴設(shè)備提供感知方案��。
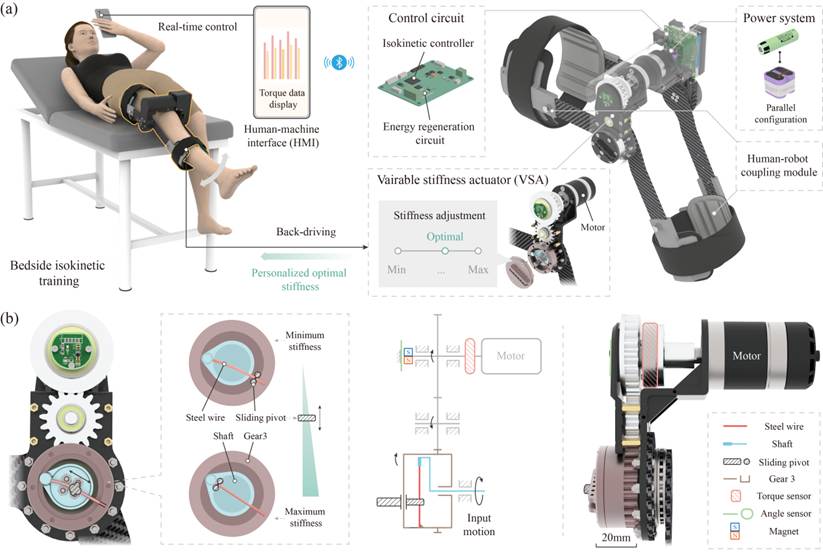
3.床旁膝關(guān)節(jié)等速抗阻訓(xùn)練機(jī)器人
傳統(tǒng)等速康復(fù)訓(xùn)練設(shè)備體積巨大使用成本高昂,在此背景下,團(tuán)隊(duì)開(kāi)發(fā)了一種輕便的床旁等速抗阻訓(xùn)練機(jī)器人����,針對(duì)傳統(tǒng)等速設(shè)備關(guān)節(jié)無(wú)柔性、能耗高的問(wèn)題�����,一方面在等速訓(xùn)練機(jī)器人中創(chuàng)新加入輕便緊湊且變剛度范圍達(dá)5.0-137.3 Nm/rad的變剛度機(jī)構(gòu),提升人機(jī)交互柔順性與安全性�,并擬定兼容患者差異的最優(yōu)剛度測(cè)定方法�,為個(gè)性化訓(xùn)練提供新思路�;另一方面基于動(dòng)態(tài)電能再生實(shí)現(xiàn)等速控制,在不額外增加硬件結(jié)構(gòu)的前提下回收人體抗阻能量供電,顯著延長(zhǎng)續(xù)航(120°/s 速度下提升57.8%)����,優(yōu)化人機(jī)能量利用效率�����。
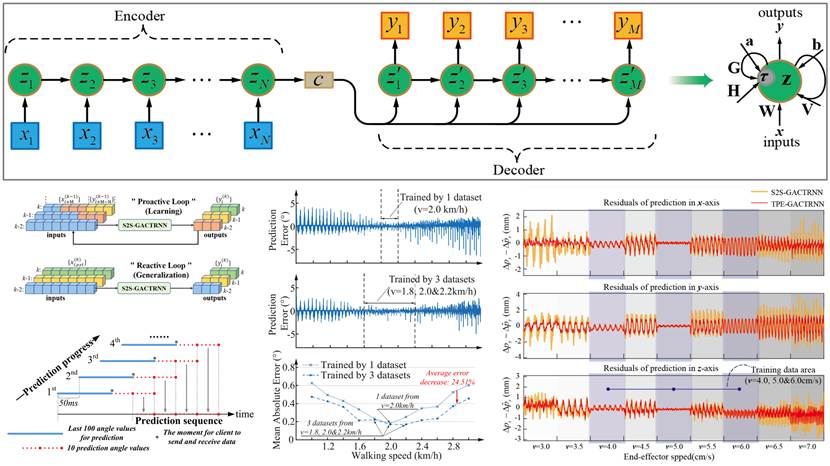
4.類(lèi)神經(jīng)啟發(fā)下時(shí)序周期信號(hào)預(yù)測(cè)與泛化技術(shù)
基于模型和預(yù)設(shè)的控制技術(shù)與算法存在一定局限性,難以保證復(fù)雜與變速工況下的適應(yīng)性�����。針對(duì)該類(lèi)機(jī)器人中的時(shí)序與變周期信號(hào),提出了基于類(lèi)腦智能啟發(fā)下的門(mén)控自適應(yīng)連續(xù)時(shí)間循環(huán)神經(jīng)網(wǎng)絡(luò)。實(shí)現(xiàn)了下肢外骨骼步態(tài)信號(hào)����,與機(jī)械臂軌跡誤差序列的預(yù)測(cè)與泛化。
03 項(xiàng)目介紹
1.主被動(dòng)一體無(wú)源等速機(jī)器人的原理探究和設(shè)計(jì)評(píng)估
l 項(xiàng)目簡(jiǎn)介
等速訓(xùn)練機(jī)器人被廣泛用于多關(guān)節(jié)術(shù)后患者的肌力評(píng)估與康復(fù),在此我們提出一種基于動(dòng)態(tài)能量再生技術(shù)的主被動(dòng)一體等速訓(xùn)練機(jī)器人�。通過(guò)將被動(dòng)階段采集的能量用于主動(dòng)階段助力訓(xùn)練��,實(shí)現(xiàn)無(wú)源等速機(jī)器人的自供電能量循環(huán)。并針對(duì)特定臨床應(yīng)用場(chǎng)景實(shí)現(xiàn)特殊患者的神經(jīng)肌肉等方面的康復(fù)和重建���。重點(diǎn)參與康復(fù)機(jī)器人控制程序的書(shū)寫(xiě)和原理驗(yàn)證���。
l 所需能力
1) 模擬電路和數(shù)字電路基本知識(shí)���。
2) 簡(jiǎn)單了解無(wú)刷電機(jī)控制的基本原理�����。
3) 簡(jiǎn)單了解stm32的程序書(shū)寫(xiě)��,有運(yùn)用Matlab基本數(shù)據(jù)處理能力。
l 相關(guān)事項(xiàng)
1) 項(xiàng)目周期:參與3-6個(gè)月,每周不少于2次��。
2) 所需人數(shù):1~3人。
3) 實(shí)驗(yàn)室會(huì)提供優(yōu)秀學(xué)生獨(dú)立文章發(fā)表、學(xué)科競(jìng)賽的機(jī)會(huì)�����,并給予支持���。
l 聯(lián)系方式
電子郵箱:wuhaoyang@buaa.edu.cn
2.柔性光學(xué)波導(dǎo)傳感與人機(jī)交互研究
l 項(xiàng)目簡(jiǎn)介
設(shè)計(jì)傳感器結(jié)構(gòu)�����,感知肌肉形變、關(guān)節(jié)運(yùn)動(dòng)及力反饋�����。結(jié)合機(jī)器學(xué)習(xí)與神經(jīng)網(wǎng)絡(luò)算法����,實(shí)現(xiàn)運(yùn)動(dòng)參數(shù)的高精度識(shí)別與肌肉三維輪廓重建。工作包括柔性光學(xué)傳感器設(shè)計(jì)與制備(材料選型、模具制作��、光路調(diào)試)��,信號(hào)采集與算法建模(STM32 ADC采集�����、濾波與特征提取����、基于python的肌肉輪廓實(shí)時(shí)數(shù)學(xué)建模)��,以及實(shí)驗(yàn)驗(yàn)證與人機(jī)交互測(cè)試(肌肉形變檢測(cè)����、步態(tài)與動(dòng)作識(shí)別���、數(shù)據(jù)可視化)��。
l 所需能力
硬件方向(任選其一或組合)
1) 熟悉STM32嵌入式平臺(tái)�����,了解傳感器接口���、ADC�����、串口通信 等基礎(chǔ)電路知識(shí)����。
2) 熟悉Solidworks等機(jī)械設(shè)計(jì)軟件,熟悉簡(jiǎn)單的模具設(shè)計(jì)�。
算法與軟件方向
1) 熟悉Python�����,能使用NumPy、Matplotlib�����、PyTorch�����,了解基本的神經(jīng)網(wǎng)絡(luò)模型或LLM模型����。
2) 有信號(hào)處理經(jīng)驗(yàn)(濾波�、特征提取)者優(yōu)先�����。
l 相關(guān)事項(xiàng)
1) 項(xiàng)目周期:能持續(xù)參與6個(gè)月以上(每周至少進(jìn)實(shí)驗(yàn)室2–3次)����。
2) 所需人數(shù):2~3人。
3) 有機(jī)會(huì)參與論文撰寫(xiě)�����、論文署名與學(xué)科競(jìng)賽。
l 聯(lián)系方式
電子郵箱:julinhang@buaa.edu.cn
