2017年第十屆智能機(jī)器人與應(yīng)用國(guó)際會(huì)議(The 10th International Conference on Intelligent Robotics and Applications)與8月15-18日在武漢召開。本次會(huì)議中我院iTR中心軟體機(jī)器人實(shí)驗(yàn)室投稿的題為《A Programmable Mechanical Freedom and Variable Stiffness Soft Actuator with Low Melting Point Alloy》的論文獲得大會(huì)最佳論文獎(jiǎng)(Best Paper Award)����。本屆會(huì)議由國(guó)家自然科學(xué)基金委員會(huì)和華中科技大學(xué)聯(lián)合主辦�����,圍繞軟體與仿生機(jī)器人�、水下機(jī)器人�、虛擬現(xiàn)實(shí)與人工智能等14個(gè)專業(yè)方向����,開展了48個(gè)分論壇��,大會(huì)共發(fā)表論文355篇�。

該研究將軟體機(jī)器人和液態(tài)金屬相結(jié)合�,利用液態(tài)金屬首次實(shí)現(xiàn)變剛度、變自由度與柔性傳感與氣動(dòng)軟體驅(qū)動(dòng)人工肌肉的一體化�����。研究中提出將變剛度層�����、串聯(lián)加熱層利用3D打印+鑄模方式嵌入到軟體驅(qū)動(dòng)器底層���,調(diào)控加熱層從而控制液態(tài)金屬的相變,進(jìn)而同時(shí)達(dá)到變剛度���、變自由度。此外��,通過液態(tài)合金微腔道獲取驅(qū)動(dòng)器的形變與曲率信息�����?���;谝簯B(tài)合金的軟體機(jī)器人不僅可以調(diào)節(jié)驅(qū)動(dòng)器剛度����,還擴(kuò)展了軟體機(jī)器人的運(yùn)動(dòng)模態(tài)����。該研究為軟體機(jī)器人未來的發(fā)展提供了新的思路����。
論文第一作者為機(jī)械學(xué)院機(jī)器人所ITR 軟體機(jī)器人實(shí)驗(yàn)室2014級(jí)博士生郝雨飛�,論文作者包括王田苗教授。論文通訊作者����、項(xiàng)目負(fù)責(zé)人為ITR 軟體機(jī)器人實(shí)驗(yàn)室文力副教授。
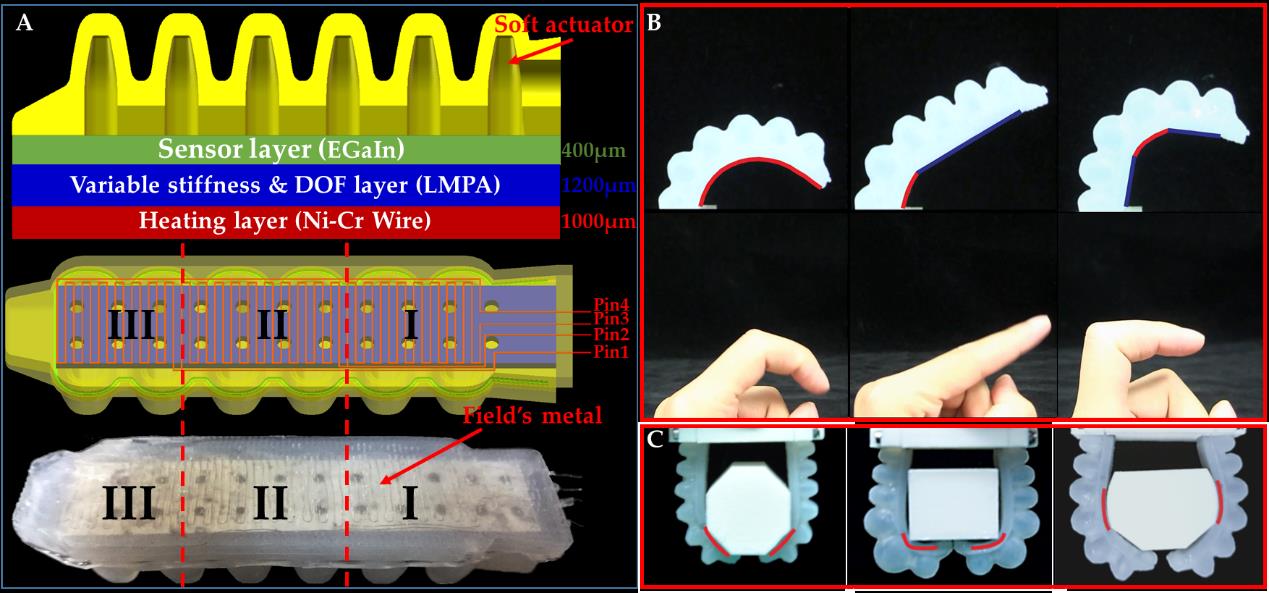
圖1 變剛度、變自由度����、柔性傳感一體化軟體驅(qū)動(dòng)器。A:驅(qū)動(dòng)器結(jié)構(gòu)展示���;B:驅(qū)動(dòng)器和人手運(yùn)動(dòng)對(duì)比;C:軟體手變自由度抓取展示��。
該項(xiàng)目獲得國(guó)家自然基金重點(diǎn)項(xiàng)目“基于軟體機(jī)器人的水下環(huán)境感知與目標(biāo)抓取”����,北航青年拔尖人才項(xiàng)目的支持���。
機(jī)械工程及自動(dòng)化學(xué)院
2017年8月21日
